Upgrade dependencies
This commit is contained in:
+1
-1
@@ -5,7 +5,7 @@ dist: trusty
|
||||
# language is go
|
||||
language: go
|
||||
go:
|
||||
- "1.13"
|
||||
- "1.14"
|
||||
go_import_path: gocv.io/x/gocv
|
||||
|
||||
addons:
|
||||
|
||||
+65
@@ -1,3 +1,68 @@
|
||||
0.24.0
|
||||
---
|
||||
* **all**
|
||||
* update Makefile and READMEChange constants and corresponding function signatures to have the correct types (#689)
|
||||
* replace master branch terminology with release
|
||||
* update to OpenCV 4.4.0
|
||||
* **calib3d**
|
||||
* add FindHomography()
|
||||
* add function EstimateAffinePartial2D()
|
||||
* add GetAffineTransform() and GetAffineTransform2f()
|
||||
* add UndistortPoints(), FisheyeUndistortPoints() and EstimateNewCameraMatrixForUndistortRectify()
|
||||
* **core**
|
||||
* add MultiplyWithParams
|
||||
* **docs**
|
||||
* add recent contributions to ROADMAP
|
||||
* create CODE_OF_CONDUCT.md
|
||||
* update copyright year
|
||||
* **features2d**
|
||||
* close returned Mat from SIFT algorithm
|
||||
* fix issue 707 with DrawKeyPoints
|
||||
* SIFT patent now expired so is part of main OpenCV modules
|
||||
* **imgproc**
|
||||
* change struct to remove GNU old-style field designator extension warning
|
||||
|
||||
0.23.0
|
||||
---
|
||||
* **build**
|
||||
* update Makefile and README
|
||||
* update to use go1.14
|
||||
* **calib3d**
|
||||
* add draw chessboard
|
||||
* **core**
|
||||
* fix memory leak in Mat.Size() and Mat.Split() (#580)
|
||||
* **cuda**
|
||||
* add build support
|
||||
* add cuda backend/target
|
||||
* add support for:
|
||||
* cv::cuda::CannyEdgeDetector
|
||||
* cv::cuda::CascadeClassifier Class
|
||||
* cv::cuda::HOG Class
|
||||
* remove breaking case statement
|
||||
* **dnn**
|
||||
* avoid parallel test runs
|
||||
* remove attempt at providing grayscale image blog conversion that uses mean adjustment
|
||||
* **docker**
|
||||
* docker file last command change (#505)
|
||||
* **docs**
|
||||
* add recent contributions to ROADMAP
|
||||
* **imgproc**
|
||||
* add ErodeWithParams function
|
||||
* add getGaussianKernel function
|
||||
* add Go Point2f type and update GetPerspectiveTransform() (#589)
|
||||
* add PhaseCorrelate binding (#626)
|
||||
* added Polylines feature
|
||||
* do not free contours data until after we have drawn the needed contours
|
||||
* Threshold() should return a value (#620)
|
||||
* **make**
|
||||
* added raspberry pi zero support to the makefile
|
||||
* **opencv**
|
||||
* update to OpenCV 4.3.0
|
||||
* **openvino**
|
||||
* add build support
|
||||
* **windows**
|
||||
* add cmake flag for allocator stats counter type to avoid opencv issue #16398
|
||||
|
||||
0.22.0
|
||||
---
|
||||
* **bgsegm**
|
||||
|
||||
+76
@@ -0,0 +1,76 @@
|
||||
# Contributor Covenant Code of Conduct
|
||||
|
||||
## Our Pledge
|
||||
|
||||
In the interest of fostering an open and welcoming environment, we as
|
||||
contributors and maintainers pledge to making participation in our project and
|
||||
our community a harassment-free experience for everyone, regardless of age, body
|
||||
size, disability, ethnicity, sex characteristics, gender identity and expression,
|
||||
level of experience, education, socio-economic status, nationality, personal
|
||||
appearance, race, religion, or sexual identity and orientation.
|
||||
|
||||
## Our Standards
|
||||
|
||||
Examples of behavior that contributes to creating a positive environment
|
||||
include:
|
||||
|
||||
* Using welcoming and inclusive language
|
||||
* Being respectful of differing viewpoints and experiences
|
||||
* Gracefully accepting constructive criticism
|
||||
* Focusing on what is best for the community
|
||||
* Showing empathy towards other community members
|
||||
|
||||
Examples of unacceptable behavior by participants include:
|
||||
|
||||
* The use of sexualized language or imagery and unwelcome sexual attention or
|
||||
advances
|
||||
* Trolling, insulting/derogatory comments, and personal or political attacks
|
||||
* Public or private harassment
|
||||
* Publishing others' private information, such as a physical or electronic
|
||||
address, without explicit permission
|
||||
* Other conduct which could reasonably be considered inappropriate in a
|
||||
professional setting
|
||||
|
||||
## Our Responsibilities
|
||||
|
||||
Project maintainers are responsible for clarifying the standards of acceptable
|
||||
behavior and are expected to take appropriate and fair corrective action in
|
||||
response to any instances of unacceptable behavior.
|
||||
|
||||
Project maintainers have the right and responsibility to remove, edit, or
|
||||
reject comments, commits, code, wiki edits, issues, and other contributions
|
||||
that are not aligned to this Code of Conduct, or to ban temporarily or
|
||||
permanently any contributor for other behaviors that they deem inappropriate,
|
||||
threatening, offensive, or harmful.
|
||||
|
||||
## Scope
|
||||
|
||||
This Code of Conduct applies both within project spaces and in public spaces
|
||||
when an individual is representing the project or its community. Examples of
|
||||
representing a project or community include using an official project e-mail
|
||||
address, posting via an official social media account, or acting as an appointed
|
||||
representative at an online or offline event. Representation of a project may be
|
||||
further defined and clarified by project maintainers.
|
||||
|
||||
## Enforcement
|
||||
|
||||
Instances of abusive, harassing, or otherwise unacceptable behavior may be
|
||||
reported by contacting the project team at info@hybridgroup.com. All
|
||||
complaints will be reviewed and investigated and will result in a response that
|
||||
is deemed necessary and appropriate to the circumstances. The project team is
|
||||
obligated to maintain confidentiality with regard to the reporter of an incident.
|
||||
Further details of specific enforcement policies may be posted separately.
|
||||
|
||||
Project maintainers who do not follow or enforce the Code of Conduct in good
|
||||
faith may face temporary or permanent repercussions as determined by other
|
||||
members of the project's leadership.
|
||||
|
||||
## Attribution
|
||||
|
||||
This Code of Conduct is adapted from the [Contributor Covenant][homepage], version 1.4,
|
||||
available at https://www.contributor-covenant.org/version/1/4/code-of-conduct.html
|
||||
|
||||
[homepage]: https://www.contributor-covenant.org
|
||||
|
||||
For answers to common questions about this code of conduct, see
|
||||
https://www.contributor-covenant.org/faq
|
||||
+1
-1
@@ -22,7 +22,7 @@ Please open a Github issue with your needs, and we can see what we can do.
|
||||
|
||||
## How to use our Github repository
|
||||
|
||||
The `master` branch of this repo will always have the latest released version of GoCV. All of the active development work for the next release will take place in the `dev` branch. GoCV will use semantic versioning and will create a tag/release for each release.
|
||||
The `release` branch of this repo will always have the latest released version of GoCV. All of the active development work for the next release will take place in the `dev` branch. GoCV will use semantic versioning and will create a tag/release for each release.
|
||||
|
||||
Here is how to contribute back some code or documentation:
|
||||
|
||||
|
||||
+9
-3
@@ -8,7 +8,7 @@ RUN apt-get update && apt-get install -y --no-install-recommends \
|
||||
libjpeg-dev libpng-dev libtiff-dev libdc1394-22-dev && \
|
||||
rm -rf /var/lib/apt/lists/*
|
||||
|
||||
ARG OPENCV_VERSION="4.2.0"
|
||||
ARG OPENCV_VERSION="4.4.0"
|
||||
ENV OPENCV_VERSION $OPENCV_VERSION
|
||||
|
||||
RUN curl -Lo opencv.zip https://github.com/opencv/opencv/archive/${OPENCV_VERSION}.zip && \
|
||||
@@ -41,7 +41,7 @@ RUN curl -Lo opencv.zip https://github.com/opencv/opencv/archive/${OPENCV_VERSIO
|
||||
FROM opencv AS gocv
|
||||
LABEL maintainer="hybridgroup"
|
||||
|
||||
ARG GOVERSION="1.13.5"
|
||||
ARG GOVERSION="1.14.1"
|
||||
ENV GOVERSION $GOVERSION
|
||||
|
||||
RUN apt-get update && apt-get install -y --no-install-recommends \
|
||||
@@ -57,4 +57,10 @@ ENV PATH $GOPATH/bin:/usr/local/go/bin:$PATH
|
||||
RUN mkdir -p "$GOPATH/src" "$GOPATH/bin" && chmod -R 777 "$GOPATH"
|
||||
WORKDIR $GOPATH
|
||||
|
||||
RUN go get -u -d gocv.io/x/gocv && go run ${GOPATH}/src/gocv.io/x/gocv/cmd/version/main.go
|
||||
RUN go get -u -d gocv.io/x/gocv
|
||||
|
||||
WORKDIR ${GOPATH}/src/gocv.io/x/gocv/cmd/version/
|
||||
|
||||
RUN go build -o gocv_version -i main.go
|
||||
|
||||
CMD ["./gocv_version"]
|
||||
|
||||
+1
-190
@@ -1,193 +1,4 @@
|
||||
|
||||
Apache License
|
||||
Version 2.0, January 2004
|
||||
http://www.apache.org/licenses/
|
||||
|
||||
TERMS AND CONDITIONS FOR USE, REPRODUCTION, AND DISTRIBUTION
|
||||
|
||||
1. Definitions.
|
||||
|
||||
"License" shall mean the terms and conditions for use, reproduction,
|
||||
and distribution as defined by Sections 1 through 9 of this document.
|
||||
|
||||
"Licensor" shall mean the copyright owner or entity authorized by
|
||||
the copyright owner that is granting the License.
|
||||
|
||||
"Legal Entity" shall mean the union of the acting entity and all
|
||||
other entities that control, are controlled by, or are under common
|
||||
control with that entity. For the purposes of this definition,
|
||||
"control" means (i) the power, direct or indirect, to cause the
|
||||
direction or management of such entity, whether by contract or
|
||||
otherwise, or (ii) ownership of fifty percent (50%) or more of the
|
||||
outstanding shares, or (iii) beneficial ownership of such entity.
|
||||
|
||||
"You" (or "Your") shall mean an individual or Legal Entity
|
||||
exercising permissions granted by this License.
|
||||
|
||||
"Source" form shall mean the preferred form for making modifications,
|
||||
including but not limited to software source code, documentation
|
||||
source, and configuration files.
|
||||
|
||||
"Object" form shall mean any form resulting from mechanical
|
||||
transformation or translation of a Source form, including but
|
||||
not limited to compiled object code, generated documentation,
|
||||
and conversions to other media types.
|
||||
|
||||
"Work" shall mean the work of authorship, whether in Source or
|
||||
Object form, made available under the License, as indicated by a
|
||||
copyright notice that is included in or attached to the work
|
||||
(an example is provided in the Appendix below).
|
||||
|
||||
"Derivative Works" shall mean any work, whether in Source or Object
|
||||
form, that is based on (or derived from) the Work and for which the
|
||||
editorial revisions, annotations, elaborations, or other modifications
|
||||
represent, as a whole, an original work of authorship. For the purposes
|
||||
of this License, Derivative Works shall not include works that remain
|
||||
separable from, or merely link (or bind by name) to the interfaces of,
|
||||
the Work and Derivative Works thereof.
|
||||
|
||||
"Contribution" shall mean any work of authorship, including
|
||||
the original version of the Work and any modifications or additions
|
||||
to that Work or Derivative Works thereof, that is intentionally
|
||||
submitted to Licensor for inclusion in the Work by the copyright owner
|
||||
or by an individual or Legal Entity authorized to submit on behalf of
|
||||
the copyright owner. For the purposes of this definition, "submitted"
|
||||
means any form of electronic, verbal, or written communication sent
|
||||
to the Licensor or its representatives, including but not limited to
|
||||
communication on electronic mailing lists, source code control systems,
|
||||
and issue tracking systems that are managed by, or on behalf of, the
|
||||
Licensor for the purpose of discussing and improving the Work, but
|
||||
excluding communication that is conspicuously marked or otherwise
|
||||
designated in writing by the copyright owner as "Not a Contribution."
|
||||
|
||||
"Contributor" shall mean Licensor and any individual or Legal Entity
|
||||
on behalf of whom a Contribution has been received by Licensor and
|
||||
subsequently incorporated within the Work.
|
||||
|
||||
2. Grant of Copyright License. Subject to the terms and conditions of
|
||||
this License, each Contributor hereby grants to You a perpetual,
|
||||
worldwide, non-exclusive, no-charge, royalty-free, irrevocable
|
||||
copyright license to reproduce, prepare Derivative Works of,
|
||||
publicly display, publicly perform, sublicense, and distribute the
|
||||
Work and such Derivative Works in Source or Object form.
|
||||
|
||||
3. Grant of Patent License. Subject to the terms and conditions of
|
||||
this License, each Contributor hereby grants to You a perpetual,
|
||||
worldwide, non-exclusive, no-charge, royalty-free, irrevocable
|
||||
(except as stated in this section) patent license to make, have made,
|
||||
use, offer to sell, sell, import, and otherwise transfer the Work,
|
||||
where such license applies only to those patent claims licensable
|
||||
by such Contributor that are necessarily infringed by their
|
||||
Contribution(s) alone or by combination of their Contribution(s)
|
||||
with the Work to which such Contribution(s) was submitted. If You
|
||||
institute patent litigation against any entity (including a
|
||||
cross-claim or counterclaim in a lawsuit) alleging that the Work
|
||||
or a Contribution incorporated within the Work constitutes direct
|
||||
or contributory patent infringement, then any patent licenses
|
||||
granted to You under this License for that Work shall terminate
|
||||
as of the date such litigation is filed.
|
||||
|
||||
4. Redistribution. You may reproduce and distribute copies of the
|
||||
Work or Derivative Works thereof in any medium, with or without
|
||||
modifications, and in Source or Object form, provided that You
|
||||
meet the following conditions:
|
||||
|
||||
(a) You must give any other recipients of the Work or
|
||||
Derivative Works a copy of this License; and
|
||||
|
||||
(b) You must cause any modified files to carry prominent notices
|
||||
stating that You changed the files; and
|
||||
|
||||
(c) You must retain, in the Source form of any Derivative Works
|
||||
that You distribute, all copyright, patent, trademark, and
|
||||
attribution notices from the Source form of the Work,
|
||||
excluding those notices that do not pertain to any part of
|
||||
the Derivative Works; and
|
||||
|
||||
(d) If the Work includes a "NOTICE" text file as part of its
|
||||
distribution, then any Derivative Works that You distribute must
|
||||
include a readable copy of the attribution notices contained
|
||||
within such NOTICE file, excluding those notices that do not
|
||||
pertain to any part of the Derivative Works, in at least one
|
||||
of the following places: within a NOTICE text file distributed
|
||||
as part of the Derivative Works; within the Source form or
|
||||
documentation, if provided along with the Derivative Works; or,
|
||||
within a display generated by the Derivative Works, if and
|
||||
wherever such third-party notices normally appear. The contents
|
||||
of the NOTICE file are for informational purposes only and
|
||||
do not modify the License. You may add Your own attribution
|
||||
notices within Derivative Works that You distribute, alongside
|
||||
or as an addendum to the NOTICE text from the Work, provided
|
||||
that such additional attribution notices cannot be construed
|
||||
as modifying the License.
|
||||
|
||||
You may add Your own copyright statement to Your modifications and
|
||||
may provide additional or different license terms and conditions
|
||||
for use, reproduction, or distribution of Your modifications, or
|
||||
for any such Derivative Works as a whole, provided Your use,
|
||||
reproduction, and distribution of the Work otherwise complies with
|
||||
the conditions stated in this License.
|
||||
|
||||
5. Submission of Contributions. Unless You explicitly state otherwise,
|
||||
any Contribution intentionally submitted for inclusion in the Work
|
||||
by You to the Licensor shall be under the terms and conditions of
|
||||
this License, without any additional terms or conditions.
|
||||
Notwithstanding the above, nothing herein shall supersede or modify
|
||||
the terms of any separate license agreement you may have executed
|
||||
with Licensor regarding such Contributions.
|
||||
|
||||
6. Trademarks. This License does not grant permission to use the trade
|
||||
names, trademarks, service marks, or product names of the Licensor,
|
||||
except as required for reasonable and customary use in describing the
|
||||
origin of the Work and reproducing the content of the NOTICE file.
|
||||
|
||||
7. Disclaimer of Warranty. Unless required by applicable law or
|
||||
agreed to in writing, Licensor provides the Work (and each
|
||||
Contributor provides its Contributions) on an "AS IS" BASIS,
|
||||
WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or
|
||||
implied, including, without limitation, any warranties or conditions
|
||||
of TITLE, NON-INFRINGEMENT, MERCHANTABILITY, or FITNESS FOR A
|
||||
PARTICULAR PURPOSE. You are solely responsible for determining the
|
||||
appropriateness of using or redistributing the Work and assume any
|
||||
risks associated with Your exercise of permissions under this License.
|
||||
|
||||
8. Limitation of Liability. In no event and under no legal theory,
|
||||
whether in tort (including negligence), contract, or otherwise,
|
||||
unless required by applicable law (such as deliberate and grossly
|
||||
negligent acts) or agreed to in writing, shall any Contributor be
|
||||
liable to You for damages, including any direct, indirect, special,
|
||||
incidental, or consequential damages of any character arising as a
|
||||
result of this License or out of the use or inability to use the
|
||||
Work (including but not limited to damages for loss of goodwill,
|
||||
work stoppage, computer failure or malfunction, or any and all
|
||||
other commercial damages or losses), even if such Contributor
|
||||
has been advised of the possibility of such damages.
|
||||
|
||||
9. Accepting Warranty or Additional Liability. While redistributing
|
||||
the Work or Derivative Works thereof, You may choose to offer,
|
||||
and charge a fee for, acceptance of support, warranty, indemnity,
|
||||
or other liability obligations and/or rights consistent with this
|
||||
License. However, in accepting such obligations, You may act only
|
||||
on Your own behalf and on Your sole responsibility, not on behalf
|
||||
of any other Contributor, and only if You agree to indemnify,
|
||||
defend, and hold each Contributor harmless for any liability
|
||||
incurred by, or claims asserted against, such Contributor by reason
|
||||
of your accepting any such warranty or additional liability.
|
||||
|
||||
END OF TERMS AND CONDITIONS
|
||||
|
||||
APPENDIX: How to apply the Apache License to your work.
|
||||
|
||||
To apply the Apache License to your work, attach the following
|
||||
boilerplate notice, with the fields enclosed by brackets "[]"
|
||||
replaced with your own identifying information. (Don't include
|
||||
the brackets!) The text should be enclosed in the appropriate
|
||||
comment syntax for the file format. We also recommend that a
|
||||
file or class name and description of purpose be included on the
|
||||
same "printed page" as the copyright notice for easier
|
||||
identification within third-party archives.
|
||||
|
||||
Copyright (c) 2017-2019 The Hybrid Group
|
||||
Copyright (c) 2017-2020 The Hybrid Group
|
||||
|
||||
Licensed under the Apache License, Version 2.0 (the "License");
|
||||
you may not use this file except in compliance with the License.
|
||||
|
||||
+106
-10
@@ -2,17 +2,23 @@
|
||||
.PHONY: test deps download build clean astyle cmds docker
|
||||
|
||||
# OpenCV version to use.
|
||||
OPENCV_VERSION?=4.2.0
|
||||
OPENCV_VERSION?=4.4.0
|
||||
|
||||
# Go version to use when building Docker image
|
||||
GOVERSION?=1.13.1
|
||||
GOVERSION?=1.14.4
|
||||
|
||||
# Temporary directory to put files into.
|
||||
TMP_DIR?=/tmp/
|
||||
|
||||
# Build shared or static library
|
||||
BUILD_SHARED_LIBS?=ON
|
||||
|
||||
# Package list for each well-known Linux distribution
|
||||
RPMS=cmake curl git gtk2-devel libpng-devel libjpeg-devel libtiff-devel tbb tbb-devel libdc1394-devel unzip
|
||||
DEBS=unzip build-essential cmake curl git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev libtbb2 libtbb-dev libjpeg-dev libpng-dev libtiff-dev libdc1394-22-dev
|
||||
RPMS=cmake curl wget git gtk2-devel libpng-devel libjpeg-devel libtiff-devel tbb tbb-devel libdc1394-devel unzip
|
||||
DEBS=unzip wget build-essential cmake curl git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev libtbb2 libtbb-dev libjpeg-dev libpng-dev libtiff-dev libdc1394-22-dev
|
||||
|
||||
explain:
|
||||
@echo "For quick install with typical defaults of both OpenCV and GoCV, run 'make install'"
|
||||
|
||||
# Detect Linux distribution
|
||||
distro_deps=
|
||||
@@ -54,12 +60,35 @@ download:
|
||||
rm opencv.zip opencv_contrib.zip
|
||||
cd -
|
||||
|
||||
# Download dldt source tarballs.
|
||||
download_dldt:
|
||||
sudo rm -rf /usr/local/dldt/
|
||||
sudo git clone https://github.com/opencv/dldt -b 2019 /usr/local/dldt/
|
||||
|
||||
# Build dldt.
|
||||
build_dldt:
|
||||
cd /usr/local/dldt/inference-engine
|
||||
sudo git submodule init
|
||||
sudo git submodule update --recursive
|
||||
sudo ./install_dependencies.sh
|
||||
sudo mv -f thirdparty/clDNN/common/intel_ocl_icd/6.3/linux/Release thirdparty/clDNN/common/intel_ocl_icd/6.3/linux/RELEASE
|
||||
sudo mkdir build
|
||||
cd build
|
||||
sudo rm -rf *
|
||||
sudo cmake -D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=/usr/local -D BUILD_SHARED_LIBS=${BUILD_SHARED_LIBS} -D ENABLE_VPU=ON -D ENABLE_MKL_DNN=ON -D ENABLE_CLDNN=ON ..
|
||||
sudo $(MAKE) -j $(shell nproc --all)
|
||||
sudo touch VERSION
|
||||
sudo mkdir -p src/ngraph
|
||||
sudo cp thirdparty/ngraph/src/ngraph/version.hpp src/ngraph
|
||||
cd -
|
||||
|
||||
# Build OpenCV.
|
||||
build:
|
||||
cd $(TMP_DIR)opencv/opencv-$(OPENCV_VERSION)
|
||||
mkdir build
|
||||
cd build
|
||||
cmake -D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=/usr/local -D OPENCV_EXTRA_MODULES_PATH=$(TMP_DIR)opencv/opencv_contrib-$(OPENCV_VERSION)/modules -D BUILD_DOCS=OFF -D BUILD_EXAMPLES=OFF -D BUILD_TESTS=OFF -D BUILD_PERF_TESTS=OFF -D BUILD_opencv_java=NO -D BUILD_opencv_python=NO -D BUILD_opencv_python2=NO -D BUILD_opencv_python3=NO -D WITH_JASPER=OFF -DOPENCV_GENERATE_PKGCONFIG=ON ..
|
||||
rm -rf *
|
||||
cmake -D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=/usr/local -D BUILD_SHARED_LIBS=${BUILD_SHARED_LIBS} -D OPENCV_EXTRA_MODULES_PATH=$(TMP_DIR)opencv/opencv_contrib-$(OPENCV_VERSION)/modules -D BUILD_DOCS=OFF -D BUILD_EXAMPLES=OFF -D BUILD_TESTS=OFF -D BUILD_PERF_TESTS=OFF -D BUILD_opencv_java=NO -D BUILD_opencv_python=NO -D BUILD_opencv_python2=NO -D BUILD_opencv_python3=NO -D WITH_JASPER=OFF -DOPENCV_GENERATE_PKGCONFIG=ON ..
|
||||
$(MAKE) -j $(shell nproc --all)
|
||||
$(MAKE) preinstall
|
||||
cd -
|
||||
@@ -69,7 +98,19 @@ build_raspi:
|
||||
cd $(TMP_DIR)opencv/opencv-$(OPENCV_VERSION)
|
||||
mkdir build
|
||||
cd build
|
||||
cmake -D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=/usr/local -D OPENCV_EXTRA_MODULES_PATH=$(TMP_DIR)opencv/opencv_contrib-$(OPENCV_VERSION)/modules -D BUILD_DOCS=OFF -D BUILD_EXAMPLES=OFF -D BUILD_TESTS=OFF -D BUILD_PERF_TESTS=OFF -D BUILD_opencv_java=OFF -D BUILD_opencv_python=NO -D BUILD_opencv_python2=NO -D BUILD_opencv_python3=NO -D ENABLE_NEON=ON -D ENABLE_VFPV3=ON -D WITH_JASPER=OFF -D OPENCV_GENERATE_PKGCONFIG=ON ..
|
||||
rm -rf *
|
||||
cmake -D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=/usr/local -D BUILD_SHARED_LIBS=${BUILD_SHARED_LIBS} -D OPENCV_EXTRA_MODULES_PATH=$(TMP_DIR)opencv/opencv_contrib-$(OPENCV_VERSION)/modules -D BUILD_DOCS=OFF -D BUILD_EXAMPLES=OFF -D BUILD_TESTS=OFF -D BUILD_PERF_TESTS=OFF -D BUILD_opencv_java=OFF -D BUILD_opencv_python=NO -D BUILD_opencv_python2=NO -D BUILD_opencv_python3=NO -D ENABLE_NEON=ON -D ENABLE_VFPV3=ON -D WITH_JASPER=OFF -D OPENCV_GENERATE_PKGCONFIG=ON ..
|
||||
$(MAKE) -j $(shell nproc --all)
|
||||
$(MAKE) preinstall
|
||||
cd -
|
||||
|
||||
# Build OpenCV on Raspberry pi zero which has ARMv6.
|
||||
build_raspi_zero:
|
||||
cd $(TMP_DIR)opencv/opencv-$(OPENCV_VERSION)
|
||||
mkdir build
|
||||
cd build
|
||||
rm -rf *
|
||||
cmake -D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=/usr/local -D BUILD_SHARED_LIBS=${BUILD_SHARED_LIBS} -D OPENCV_EXTRA_MODULES_PATH=$(TMP_DIR)opencv/opencv_contrib-$(OPENCV_VERSION)/modules -D BUILD_DOCS=OFF -D BUILD_EXAMPLES=OFF -D BUILD_TESTS=OFF -D BUILD_PERF_TESTS=OFF -D BUILD_opencv_java=OFF -D BUILD_opencv_python=NO -D BUILD_opencv_python2=NO -D BUILD_opencv_python3=NO -D ENABLE_VFPV2=ON -D WITH_JASPER=OFF -D OPENCV_GENERATE_PKGCONFIG=ON ..
|
||||
$(MAKE) -j $(shell nproc --all)
|
||||
$(MAKE) preinstall
|
||||
cd -
|
||||
@@ -79,7 +120,19 @@ build_nonfree:
|
||||
cd $(TMP_DIR)opencv/opencv-$(OPENCV_VERSION)
|
||||
mkdir build
|
||||
cd build
|
||||
cmake -D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=/usr/local -D OPENCV_EXTRA_MODULES_PATH=$(TMP_DIR)opencv/opencv_contrib-$(OPENCV_VERSION)/modules -D BUILD_DOCS=OFF -D BUILD_EXAMPLES=OFF -D BUILD_TESTS=OFF -D BUILD_PERF_TESTS=OFF -D BUILD_opencv_java=NO -D BUILD_opencv_python=NO -D BUILD_opencv_python2=NO -D BUILD_opencv_python3=NO -D WITH_JASPER=OFF -DOPENCV_GENERATE_PKGCONFIG=ON -DOPENCV_ENABLE_NONFREE=ON ..
|
||||
rm -rf *
|
||||
cmake -D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=/usr/local -D BUILD_SHARED_LIBS=${BUILD_SHARED_LIBS} -D OPENCV_EXTRA_MODULES_PATH=$(TMP_DIR)opencv/opencv_contrib-$(OPENCV_VERSION)/modules -D BUILD_DOCS=OFF -D BUILD_EXAMPLES=OFF -D BUILD_TESTS=OFF -D BUILD_PERF_TESTS=OFF -D BUILD_opencv_java=NO -D BUILD_opencv_python=NO -D BUILD_opencv_python2=NO -D BUILD_opencv_python3=NO -D WITH_JASPER=OFF -DOPENCV_GENERATE_PKGCONFIG=ON -DOPENCV_ENABLE_NONFREE=ON ..
|
||||
$(MAKE) -j $(shell nproc --all)
|
||||
$(MAKE) preinstall
|
||||
cd -
|
||||
|
||||
# Build OpenCV with openvino.
|
||||
build_openvino:
|
||||
cd $(TMP_DIR)opencv/opencv-$(OPENCV_VERSION)
|
||||
mkdir build
|
||||
cd build
|
||||
rm -rf *
|
||||
cmake -D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=/usr/local -D BUILD_SHARED_LIBS=${BUILD_SHARED_LIBS} -D ENABLE_CXX11=ON -D OPENCV_EXTRA_MODULES_PATH=$(TMP_DIR)opencv/opencv_contrib-$(OPENCV_VERSION)/modules -D WITH_INF_ENGINE=ON -D InferenceEngine_DIR=/usr/local/dldt/inference-engine/build -D BUILD_DOCS=OFF -D BUILD_EXAMPLES=OFF -D BUILD_TESTS=OFF -D BUILD_PERF_TESTS=OFF -D BUILD_opencv_java=NO -D BUILD_opencv_python=NO -D BUILD_opencv_python2=NO -D BUILD_opencv_python3=NO -D WITH_JASPER=OFF -DOPENCV_GENERATE_PKGCONFIG=ON -DOPENCV_ENABLE_NONFREE=ON ..
|
||||
$(MAKE) -j $(shell nproc --all)
|
||||
$(MAKE) preinstall
|
||||
cd -
|
||||
@@ -89,7 +142,19 @@ build_cuda:
|
||||
cd $(TMP_DIR)opencv/opencv-$(OPENCV_VERSION)
|
||||
mkdir build
|
||||
cd build
|
||||
cmake -j $(shell nproc --all) -D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=/usr/local -D OPENCV_EXTRA_MODULES_PATH=$(TMP_DIR)opencv/opencv_contrib-$(OPENCV_VERSION)/modules -D BUILD_DOCS=OFF -D BUILD_EXAMPLES=OFF -D BUILD_TESTS=OFF -D BUILD_PERF_TESTS=OFF -D BUILD_opencv_java=NO -D BUILD_opencv_python=NO -D BUILD_opencv_python2=NO -D BUILD_opencv_python3=NO -D WITH_JASPER=OFF -DOPENCV_GENERATE_PKGCONFIG=ON -DWITH_CUDA=ON -DENABLE_FAST_MATH=1 -DCUDA_FAST_MATH=1 -DWITH_CUBLAS=1 -DCUDA_TOOLKIT_ROOT_DIR=/usr/local/cuda/ -DBUILD_opencv_cudacodec=OFF ..
|
||||
rm -rf *
|
||||
cmake -j $(shell nproc --all) -D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=/usr/local -D BUILD_SHARED_LIBS=${BUILD_SHARED_LIBS} -D OPENCV_EXTRA_MODULES_PATH=$(TMP_DIR)opencv/opencv_contrib-$(OPENCV_VERSION)/modules -D BUILD_DOCS=OFF -D BUILD_EXAMPLES=OFF -D BUILD_TESTS=OFF -D BUILD_PERF_TESTS=OFF -D BUILD_opencv_java=NO -D BUILD_opencv_python=NO -D BUILD_opencv_python2=NO -D BUILD_opencv_python3=NO -D WITH_JASPER=OFF -DOPENCV_GENERATE_PKGCONFIG=ON -DWITH_CUDA=ON -DENABLE_FAST_MATH=1 -DCUDA_FAST_MATH=1 -DWITH_CUBLAS=1 -DCUDA_TOOLKIT_ROOT_DIR=/usr/local/cuda/ -DBUILD_opencv_cudacodec=OFF -D WITH_CUDNN=ON -D OPENCV_DNN_CUDA=ON -D CUDA_GENERATION=Auto ..
|
||||
$(MAKE) -j $(shell nproc --all)
|
||||
$(MAKE) preinstall
|
||||
cd -
|
||||
|
||||
# Build OpenCV with cuda.
|
||||
build_all:
|
||||
cd $(TMP_DIR)opencv/opencv-$(OPENCV_VERSION)
|
||||
mkdir build
|
||||
cd build
|
||||
rm -rf *
|
||||
cmake -j $(shell nproc --all) -D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=/usr/local -D BUILD_SHARED_LIBS=${BUILD_SHARED_LIBS} -D ENABLE_CXX11=ON -D OPENCV_EXTRA_MODULES_PATH=$(TMP_DIR)opencv/opencv_contrib-$(OPENCV_VERSION)/modules -D WITH_INF_ENGINE=ON -D InferenceEngine_DIR=/usr/local/dldt/inference-engine/build -D BUILD_DOCS=OFF -D BUILD_EXAMPLES=OFF -D BUILD_TESTS=OFF -D BUILD_PERF_TESTS=OFF -D BUILD_opencv_java=NO -D BUILD_opencv_python=NO -D BUILD_opencv_python2=NO -D BUILD_opencv_python3=NO -D WITH_JASPER=OFF -DOPENCV_GENERATE_PKGCONFIG=ON -DWITH_CUDA=ON -DENABLE_FAST_MATH=1 -DCUDA_FAST_MATH=1 -DWITH_CUBLAS=1 -DCUDA_TOOLKIT_ROOT_DIR=/usr/local/cuda/ -DBUILD_opencv_cudacodec=OFF -D WITH_CUDNN=ON -D OPENCV_DNN_CUDA=ON -D CUDA_GENERATION=Auto ..
|
||||
$(MAKE) -j $(shell nproc --all)
|
||||
$(MAKE) preinstall
|
||||
cd -
|
||||
@@ -99,14 +164,30 @@ clean:
|
||||
go clean --cache
|
||||
rm -rf $(TMP_DIR)opencv
|
||||
|
||||
# Cleanup old library files.
|
||||
sudo_pre_install_clean:
|
||||
sudo rm -rf /usr/local/lib/cmake/opencv4/
|
||||
sudo rm -rf /usr/local/lib/libopencv*
|
||||
sudo rm -rf /usr/local/lib/pkgconfig/opencv*
|
||||
sudo rm -rf /usr/local/include/opencv*
|
||||
|
||||
# Do everything.
|
||||
install: deps download build sudo_install clean verify
|
||||
install: deps download sudo_pre_install_clean build sudo_install clean verify
|
||||
|
||||
# Do everything on Raspbian.
|
||||
install_raspi: deps download build_raspi sudo_install clean verify
|
||||
|
||||
# Do everything on the raspberry pi zero.
|
||||
install_raspi_zero: deps download build_raspi_zero sudo_install clean verify
|
||||
|
||||
# Do everything with cuda.
|
||||
install_cuda: deps download build_cuda sudo_install clean verify
|
||||
install_cuda: deps download sudo_pre_install_clean build_cuda sudo_install clean verify verify_cuda
|
||||
|
||||
# Do everything with openvino.
|
||||
install_openvino: deps download download_dldt sudo_pre_install_clean build_dldt sudo_install_dldt build_openvino sudo_install clean verify_openvino
|
||||
|
||||
# Do everything with openvino and cuda.
|
||||
install_all: deps download download_dldt sudo_pre_install_clean build_dldt sudo_install_dldt build_all sudo_install clean verify_openvino verify_cuda
|
||||
|
||||
# Install system wide.
|
||||
sudo_install:
|
||||
@@ -115,10 +196,25 @@ sudo_install:
|
||||
sudo ldconfig
|
||||
cd -
|
||||
|
||||
# Install system wide.
|
||||
sudo_install_dldt:
|
||||
cd /usr/local/dldt/inference-engine/build
|
||||
sudo $(MAKE) install
|
||||
sudo ldconfig
|
||||
cd -
|
||||
|
||||
# Build a minimal Go app to confirm gocv works.
|
||||
verify:
|
||||
go run ./cmd/version/main.go
|
||||
|
||||
# Build a minimal Go app to confirm gocv cuda works.
|
||||
verify_cuda:
|
||||
go run ./cmd/cuda/main.go
|
||||
|
||||
# Build a minimal Go app to confirm gocv openvino works.
|
||||
verify_openvino:
|
||||
go run -tags openvino ./cmd/version/main.go
|
||||
|
||||
# Runs tests.
|
||||
# This assumes env.sh was already sourced.
|
||||
# pvt is not tested here since it requires additional depenedences.
|
||||
|
||||
+58
-24
@@ -1,17 +1,17 @@
|
||||
# GoCV
|
||||
|
||||
[](http://gocv.io/)
|
||||
[](http://gocv.io/)
|
||||
|
||||
[](https://godoc.org/github.com/hybridgroup/gocv)
|
||||
[](https://travis-ci.org/hybridgroup/gocv)
|
||||
[](https://ci.appveyor.com/project/deadprogram/gocv/branch/dev)
|
||||
[](https://codecov.io/gh/hybridgroup/gocv)
|
||||
[](https://goreportcard.com/report/github.com/hybridgroup/gocv)
|
||||
[](https://github.com/hybridgroup/gocv/blob/master/LICENSE.txt)
|
||||
[](https://github.com/hybridgroup/gocv/blob/release/LICENSE.txt)
|
||||
|
||||
The GoCV package provides Go language bindings for the [OpenCV 4](http://opencv.org/) computer vision library.
|
||||
|
||||
The GoCV package supports the latest releases of Go and OpenCV (v4.2.0) on Linux, macOS, and Windows. We intend to make the Go language a "first-class" client compatible with the latest developments in the OpenCV ecosystem.
|
||||
The GoCV package supports the latest releases of Go and OpenCV (v4.4.0) on Linux, macOS, and Windows. We intend to make the Go language a "first-class" client compatible with the latest developments in the OpenCV ecosystem.
|
||||
|
||||
GoCV also supports [Intel OpenVINO](https://software.intel.com/en-us/openvino-toolkit). Check out the [OpenVINO README](./openvino/README.md) for more info on how to use GoCV with the Intel OpenVINO toolkit.
|
||||
|
||||
@@ -43,7 +43,7 @@ func main() {
|
||||
|
||||
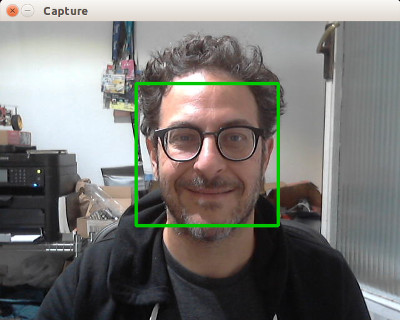
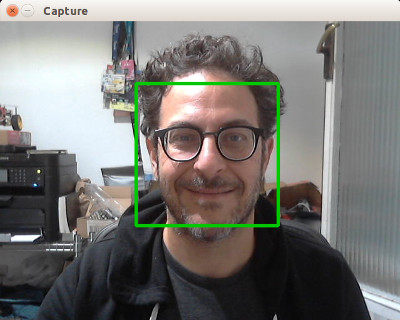
### Face detect
|
||||
|
||||
|
||||
|
||||
|
||||
This is a more complete example that opens a video capture device using device "0". It also uses the CascadeClassifier class to load an external data file containing the classifier data. The program grabs each frame from the video, then uses the classifier to detect faces. If any faces are found, it draws a green rectangle around each one, then displays the video in an output window:
|
||||
|
||||
@@ -127,28 +127,58 @@ To install GoCV, run the following command:
|
||||
go get -u -d gocv.io/x/gocv
|
||||
```
|
||||
|
||||
To run code that uses the GoCV package, you must also install OpenCV 4.2.0 on your system. Here are instructions for Ubuntu, Raspian, macOS, and Windows.
|
||||
To run code that uses the GoCV package, you must also install OpenCV 4.4.0 on your system. Here are instructions for Ubuntu, Raspian, macOS, and Windows.
|
||||
|
||||
## Ubuntu/Linux
|
||||
|
||||
### Installation
|
||||
|
||||
You can use `make` to install OpenCV 4.2.0 with the handy `Makefile` included with this repo. If you already have installed OpenCV, you do not need to do so again. The installation performed by the `Makefile` is minimal, so it may remove OpenCV options such as Python or Java wrappers if you have already installed OpenCV some other way.
|
||||
You can use `make` to install OpenCV 4.4.0 with the handy `Makefile` included with this repo. If you already have installed OpenCV, you do not need to do so again. The installation performed by the `Makefile` is minimal, so it may remove OpenCV options such as Python or Java wrappers if you have already installed OpenCV some other way.
|
||||
|
||||
#### Quick Install
|
||||
|
||||
The following commands should do everything to download and install OpenCV 4.2.0 on Linux:
|
||||
The following commands should do everything to download and install OpenCV 4.4.0 on Linux:
|
||||
|
||||
cd $GOPATH/src/gocv.io/x/gocv
|
||||
make install
|
||||
|
||||
If you need static opencv libraries
|
||||
|
||||
make install BUILD_SHARED_LIBS=OFF
|
||||
|
||||
If it works correctly, at the end of the entire process, the following message should be displayed:
|
||||
|
||||
gocv version: 0.22.0
|
||||
opencv lib version: 4.2.0
|
||||
opencv lib version: 4.4.0
|
||||
|
||||
That's it, now you are ready to use GoCV.
|
||||
|
||||
#### Install Cuda
|
||||
|
||||
[cuda directory](./cuda)
|
||||
|
||||
#### Install OpenVINO
|
||||
|
||||
[openvino directory](./openvino)
|
||||
|
||||
#### Install OpenVINO and Cuda
|
||||
|
||||
The following commands should do everything to download and install OpenCV 4.4.0 with Cuda and OpenVINO on Linux:
|
||||
|
||||
cd $GOPATH/src/gocv.io/x/gocv
|
||||
make install_all
|
||||
|
||||
If you need static opencv libraries
|
||||
|
||||
make install_all BUILD_SHARED_LIBS=OFF
|
||||
|
||||
If it works correctly, at the end of the entire process, the following message should be displayed:
|
||||
|
||||
gocv version: 0.22.0
|
||||
opencv lib version: 4.4.0-openvino
|
||||
cuda information:
|
||||
Device 0: "GeForce MX150" 2003Mb, sm_61, Driver/Runtime ver.10.0/10.0
|
||||
|
||||
#### Complete Install
|
||||
|
||||
If you have already done the "Quick Install" as described above, you do not need to run any further commands. For the curious, or for custom installations, here are the details for each of the steps that are performed when you run `make install`.
|
||||
@@ -165,7 +195,7 @@ Next, you need to update the system, and install any required packages:
|
||||
|
||||
#### Download source
|
||||
|
||||
Now, download the OpenCV 4.2.0 and OpenCV Contrib source code:
|
||||
Now, download the OpenCV 4.4.0 and OpenCV Contrib source code:
|
||||
|
||||
make download
|
||||
|
||||
@@ -175,6 +205,10 @@ Build everything. This will take quite a while:
|
||||
|
||||
make build
|
||||
|
||||
If you need static opencv libraries
|
||||
|
||||
make build BUILD_SHARED_LIBS=OFF
|
||||
|
||||
#### Install
|
||||
|
||||
Once the code is built, you are ready to install:
|
||||
@@ -196,7 +230,7 @@ Now you should be able to build or run any of the examples:
|
||||
The version program should output the following:
|
||||
|
||||
gocv version: 0.22.0
|
||||
opencv lib version: 4.2.0
|
||||
opencv lib version: 4.4.0
|
||||
|
||||
#### Cleanup extra files
|
||||
|
||||
@@ -281,11 +315,11 @@ There is a Docker image with Alpine 3.7 that has been created by project contrib
|
||||
|
||||
### Installation
|
||||
|
||||
We have a special installation for the Raspberry Pi that includes some hardware optimizations. You use `make` to install OpenCV 4.2.0 with the handy `Makefile` included with this repo. If you already have installed OpenCV, you do not need to do so again. The installation performed by the `Makefile` is minimal, so it may remove OpenCV options such as Python or Java wrappers if you have already installed OpenCV some other way.
|
||||
We have a special installation for the Raspberry Pi that includes some hardware optimizations. You use `make` to install OpenCV 4.4.0 with the handy `Makefile` included with this repo. If you already have installed OpenCV, you do not need to do so again. The installation performed by the `Makefile` is minimal, so it may remove OpenCV options such as Python or Java wrappers if you have already installed OpenCV some other way.
|
||||
|
||||
#### Quick Install
|
||||
|
||||
The following commands should do everything to download and install OpenCV 4.2.0 on Raspbian:
|
||||
The following commands should do everything to download and install OpenCV 4.4.0 on Raspbian:
|
||||
|
||||
cd $GOPATH/src/gocv.io/x/gocv
|
||||
make install_raspi
|
||||
@@ -293,7 +327,7 @@ The following commands should do everything to download and install OpenCV 4.2.0
|
||||
If it works correctly, at the end of the entire process, the following message should be displayed:
|
||||
|
||||
gocv version: 0.22.0
|
||||
opencv lib version: 4.2.0
|
||||
opencv lib version: 4.4.0
|
||||
|
||||
That's it, now you are ready to use GoCV.
|
||||
|
||||
@@ -301,13 +335,13 @@ That's it, now you are ready to use GoCV.
|
||||
|
||||
### Installation
|
||||
|
||||
You can install OpenCV 4.2.0 using Homebrew.
|
||||
You can install OpenCV 4.4.0 using Homebrew.
|
||||
|
||||
If you already have an earlier version of OpenCV (3.4.x) installed, you should probably remove it before installing the new version:
|
||||
|
||||
brew uninstall opencv
|
||||
|
||||
You can then install OpenCV 4.2.0:
|
||||
You can then install OpenCV 4.4.0:
|
||||
|
||||
brew install opencv
|
||||
|
||||
@@ -332,7 +366,7 @@ Now you should be able to build or run any of the examples:
|
||||
The version program should output the following:
|
||||
|
||||
gocv version: 0.22.0
|
||||
opencv lib version: 4.2.0
|
||||
opencv lib version: 4.4.0
|
||||
|
||||
### Cache builds
|
||||
|
||||
@@ -347,8 +381,8 @@ By default, pkg-config is used to determine the correct flags for compiling and
|
||||
For example:
|
||||
|
||||
export CGO_CXXFLAGS="--std=c++11"
|
||||
export CGO_CPPFLAGS="-I/usr/local/Cellar/opencv/4.2.0/include"
|
||||
export CGO_LDFLAGS="-L/usr/local/Cellar/opencv/4.2.0/lib -lopencv_stitching -lopencv_superres -lopencv_videostab -lopencv_aruco -lopencv_bgsegm -lopencv_bioinspired -lopencv_ccalib -lopencv_dnn_objdetect -lopencv_dpm -lopencv_face -lopencv_photo -lopencv_fuzzy -lopencv_hfs -lopencv_img_hash -lopencv_line_descriptor -lopencv_optflow -lopencv_reg -lopencv_rgbd -lopencv_saliency -lopencv_stereo -lopencv_structured_light -lopencv_phase_unwrapping -lopencv_surface_matching -lopencv_tracking -lopencv_datasets -lopencv_dnn -lopencv_plot -lopencv_xfeatures2d -lopencv_shape -lopencv_video -lopencv_ml -lopencv_ximgproc -lopencv_calib3d -lopencv_features2d -lopencv_highgui -lopencv_videoio -lopencv_flann -lopencv_xobjdetect -lopencv_imgcodecs -lopencv_objdetect -lopencv_xphoto -lopencv_imgproc -lopencv_core"
|
||||
export CGO_CPPFLAGS="-I/usr/local/Cellar/opencv/4.4.0/include"
|
||||
export CGO_LDFLAGS="-L/usr/local/Cellar/opencv/4.4.0/lib -lopencv_stitching -lopencv_superres -lopencv_videostab -lopencv_aruco -lopencv_bgsegm -lopencv_bioinspired -lopencv_ccalib -lopencv_dnn_objdetect -lopencv_dpm -lopencv_face -lopencv_photo -lopencv_fuzzy -lopencv_hfs -lopencv_img_hash -lopencv_line_descriptor -lopencv_optflow -lopencv_reg -lopencv_rgbd -lopencv_saliency -lopencv_stereo -lopencv_structured_light -lopencv_phase_unwrapping -lopencv_surface_matching -lopencv_tracking -lopencv_datasets -lopencv_dnn -lopencv_plot -lopencv_xfeatures2d -lopencv_shape -lopencv_video -lopencv_ml -lopencv_ximgproc -lopencv_calib3d -lopencv_features2d -lopencv_highgui -lopencv_videoio -lopencv_flann -lopencv_xobjdetect -lopencv_imgcodecs -lopencv_objdetect -lopencv_xphoto -lopencv_imgproc -lopencv_core"
|
||||
|
||||
Please note that you will need to run these 3 lines of code one time in your current session in order to build or run the code, in order to setup the needed ENV variables. Once you have done so, you can execute code that uses GoCV with your custom environment like this:
|
||||
|
||||
@@ -360,11 +394,11 @@ Please note that you will need to run these 3 lines of code one time in your cur
|
||||
|
||||
The following assumes that you are running a 64-bit version of Windows 10.
|
||||
|
||||
In order to build and install OpenCV 4.2.0 on Windows, you must first download and install MinGW-W64 and CMake, as follows.
|
||||
In order to build and install OpenCV 4.4.0 on Windows, you must first download and install MinGW-W64 and CMake, as follows.
|
||||
|
||||
#### MinGW-W64
|
||||
|
||||
Download and run the MinGW-W64 compiler installer from [https://sourceforge.net/projects/mingw-w64/?source=typ_redirect](https://sourceforge.net/projects/mingw-w64/?source=typ_redirect).
|
||||
Download and run the MinGW-W64 compiler installer from [https://sourceforge.net/projects/mingw-w64/files/Toolchains%20targetting%20Win32/Personal%20Builds/mingw-builds/7.3.0/](https://sourceforge.net/projects/mingw-w64/files/Toolchains%20targetting%20Win32/Personal%20Builds/mingw-builds/7.3.0/).
|
||||
|
||||
The latest version of the MinGW-W64 toolchain is `7.3.0`, but any version from `7.X` on should work.
|
||||
|
||||
@@ -376,9 +410,9 @@ Add the `C:\Program Files\mingw-w64\x86_64-7.3.0-posix-seh-rt_v5-rev2\mingw64\bi
|
||||
|
||||
Download and install CMake [https://cmake.org/download/](https://cmake.org/download/) to the default location. CMake installer will add CMake to your system path.
|
||||
|
||||
#### OpenCV 4.2.0 and OpenCV Contrib Modules
|
||||
#### OpenCV 4.4.0 and OpenCV Contrib Modules
|
||||
|
||||
The following commands should do everything to download and install OpenCV 4.2.0 on Windows:
|
||||
The following commands should do everything to download and install OpenCV 4.4.0 on Windows:
|
||||
|
||||
chdir %GOPATH%\src\gocv.io\x\gocv
|
||||
win_build_opencv.cmd
|
||||
@@ -400,7 +434,7 @@ Now you should be able to build or run any of the command examples:
|
||||
The version program should output the following:
|
||||
|
||||
gocv version: 0.22.0
|
||||
opencv lib version: 4.2.0
|
||||
opencv lib version: 4.4.0
|
||||
|
||||
That's it, now you are ready to use GoCV.
|
||||
|
||||
@@ -554,6 +588,6 @@ This package was inspired by the original https://github.com/go-opencv/go-opencv
|
||||
|
||||
## License
|
||||
|
||||
Licensed under the Apache 2.0 license. Copyright (c) 2017-2019 The Hybrid Group.
|
||||
Licensed under the Apache 2.0 license. Copyright (c) 2017-2020 The Hybrid Group.
|
||||
|
||||
Logo generated by GopherizeMe - https://gopherize.me
|
||||
|
||||
-13
@@ -25,7 +25,6 @@ Your pull requests will be greatly appreciated!
|
||||
- [ ] [randn](https://docs.opencv.org/master/d2/de8/group__core__array.html#gaeff1f61e972d133a04ce3a5f81cf6808)
|
||||
- [ ] [randShuffle](https://docs.opencv.org/master/d2/de8/group__core__array.html#ga6a789c8a5cb56c6dd62506179808f763)
|
||||
- [ ] [randu](https://docs.opencv.org/master/d2/de8/group__core__array.html#ga1ba1026dca0807b27057ba6a49d258c0)
|
||||
- [x] [setIdentity](https://docs.opencv.org/master/d2/de8/group__core__array.html#ga388d7575224a4a277ceb98ccaa327c99)
|
||||
- [ ] [setRNGSeed](https://docs.opencv.org/master/d2/de8/group__core__array.html#ga757e657c037410d9e19e819569e7de0f)
|
||||
- [ ] [SVBackSubst](https://docs.opencv.org/master/d2/de8/group__core__array.html#gab4e620e6fc6c8a27bb2be3d50a840c0b)
|
||||
- [ ] [SVDecomp](https://docs.opencv.org/master/d2/de8/group__core__array.html#gab477b5b7b39b370bb03e75b19d2d5109)
|
||||
@@ -45,31 +44,25 @@ Your pull requests will be greatly appreciated!
|
||||
- [ ] [buildPyramid](https://docs.opencv.org/master/d4/d86/group__imgproc__filter.html#gacfdda2bc1ac55e96de7e9f0bce7238c0)
|
||||
- [ ] [getDerivKernels](https://docs.opencv.org/master/d4/d86/group__imgproc__filter.html#ga6d6c23f7bd3f5836c31cfae994fc4aea)
|
||||
- [ ] [getGaborKernel](https://docs.opencv.org/master/d4/d86/group__imgproc__filter.html#gae84c92d248183bd92fa713ce51cc3599)
|
||||
- [ ] [getGaussianKernel](https://docs.opencv.org/master/d4/d86/group__imgproc__filter.html#gac05a120c1ae92a6060dd0db190a61afa)
|
||||
- [ ] [morphologyExWithParams](https://docs.opencv.org/master/d4/d86/group__imgproc__filter.html#ga67493776e3ad1a3df63883829375201f)
|
||||
- [ ] [pyrMeanShiftFiltering](https://docs.opencv.org/master/d4/d86/group__imgproc__filter.html#ga9fabdce9543bd602445f5db3827e4cc0)
|
||||
|
||||
- [ ] **Geometric Image Transformations - WORK STARTED** The following functions still need implementation:
|
||||
- [ ] [convertMaps](https://docs.opencv.org/master/da/d54/group__imgproc__transform.html#ga9156732fa8f01be9ebd1a194f2728b7f)
|
||||
- [ ] [getAffineTransform](https://docs.opencv.org/master/da/d54/group__imgproc__transform.html#ga8f6d378f9f8eebb5cb55cd3ae295a999)
|
||||
- [ ] [getDefaultNewCameraMatrix](https://docs.opencv.org/master/da/d54/group__imgproc__transform.html#ga744529385e88ef7bc841cbe04b35bfbf)
|
||||
- [X] [getRectSubPix](https://docs.opencv.org/master/da/d54/group__imgproc__transform.html#ga77576d06075c1a4b6ba1a608850cd614)
|
||||
- [ ] [initUndistortRectifyMap](https://docs.opencv.org/master/da/d54/group__imgproc__transform.html#ga7dfb72c9cf9780a347fbe3d1c47e5d5a)
|
||||
- [ ] [initWideAngleProjMap](https://docs.opencv.org/master/da/d54/group__imgproc__transform.html#gaceb049ec48898d1dadd5b50c604429c8)
|
||||
- [ ] [undistort](https://docs.opencv.org/master/da/d54/group__imgproc__transform.html#ga69f2545a8b62a6b0fc2ee060dc30559d)
|
||||
- [ ] [undistortPoints](https://docs.opencv.org/master/da/d54/group__imgproc__transform.html#ga55c716492470bfe86b0ee9bf3a1f0f7e)
|
||||
|
||||
- [ ] **Miscellaneous Image Transformations - WORK STARTED** The following functions still need implementation:
|
||||
- [ ] [cvtColorTwoPlane](https://docs.opencv.org/master/d7/d1b/group__imgproc__misc.html#ga8e873314e72a1a6c0252375538fbf753)
|
||||
- [ ] [floodFill](https://docs.opencv.org/master/d7/d1b/group__imgproc__misc.html#gaf1f55a048f8a45bc3383586e80b1f0d0)
|
||||
|
||||
- [ ] **Drawing Functions - WORK STARTED** The following functions still need implementation:
|
||||
- [X] [clipLine](https://docs.opencv.org/master/d6/d6e/group__imgproc__draw.html#gaf483cb46ad6b049bc35ec67052ef1c2c)
|
||||
- [ ] [drawMarker](https://docs.opencv.org/master/d6/d6e/group__imgproc__draw.html#ga482fa7b0f578fcdd8a174904592a6250)
|
||||
- [ ] [ellipse2Poly](https://docs.opencv.org/master/d6/d6e/group__imgproc__draw.html#ga727a72a3f6a625a2ae035f957c61051f)
|
||||
- [ ] [fillConvexPoly](https://docs.opencv.org/master/d6/d6e/group__imgproc__draw.html#ga906aae1606ea4ed2f27bec1537f6c5c2)
|
||||
- [ ] [getFontScaleFromHeight](https://docs.opencv.org/master/d6/d6e/group__imgproc__draw.html#ga442ff925c1a957794a1309e0ed3ba2c3)
|
||||
- [ ] [polylines](https://docs.opencv.org/master/d6/d6e/group__imgproc__draw.html#ga444cb8a2666320f47f09d5af08d91ffb)
|
||||
|
||||
- [ ] ColorMaps in OpenCV
|
||||
- [ ] Planar Subdivision
|
||||
@@ -135,7 +128,6 @@ Your pull requests will be greatly appreciated!
|
||||
- [ ] [drawFrameAxes](https://docs.opencv.org/master/d9/d0c/group__calib3d.html)
|
||||
- [ ] [estimateAffine2D](https://docs.opencv.org/master/d9/d0c/group__calib3d.html)
|
||||
- [ ] [estimateAffine3D](https://docs.opencv.org/master/d9/d0c/group__calib3d.html)
|
||||
- [ ] [estimateAffinePartial2D](https://docs.opencv.org/master/d9/d0c/group__calib3d.html)
|
||||
- [ ] [filterHomographyDecompByVisibleRefpoints](https://docs.opencv.org/master/d9/d0c/group__calib3d.html)
|
||||
- [ ] [filterSpeckles](https://docs.opencv.org/master/d9/d0c/group__calib3d.html)
|
||||
- [ ] [find4QuadCornerSubpix](https://docs.opencv.org/master/d9/d0c/group__calib3d.html)
|
||||
@@ -144,7 +136,6 @@ Your pull requests will be greatly appreciated!
|
||||
- [ ] [findCirclesGrid](https://docs.opencv.org/master/d9/d0c/group__calib3d.html)
|
||||
- [ ] [findEssentialMat](https://docs.opencv.org/master/d9/d0c/group__calib3d.html)
|
||||
- [ ] [findFundamentalMat](https://docs.opencv.org/master/d9/d0c/group__calib3d.html)
|
||||
- [ ] [findHomography](https://docs.opencv.org/master/d9/d0c/group__calib3d.html)
|
||||
- [ ] [getDefaultNewCameraMatrix](https://docs.opencv.org/master/d9/d0c/group__calib3d.html)
|
||||
- [ ] [getOptimalNewCameraMatrix](https://docs.opencv.org/master/d9/d0c/group__calib3d.html)
|
||||
- [ ] [getValidDisparityROI](https://docs.opencv.org/master/d9/d0c/group__calib3d.html)
|
||||
@@ -169,18 +160,14 @@ Your pull requests will be greatly appreciated!
|
||||
- [ ] [stereoRectify](https://docs.opencv.org/master/d9/d0c/group__calib3d.html)
|
||||
- [ ] [stereoRectifyUncalibrated](https://docs.opencv.org/master/d9/d0c/group__calib3d.html)
|
||||
- [ ] [triangulatePoints](https://docs.opencv.org/master/d9/d0c/group__calib3d.html)
|
||||
- [x] [undistort](https://docs.opencv.org/master/d9/d0c/group__calib3d.html)
|
||||
- [ ] [undistortPoints](https://docs.opencv.org/master/d9/d0c/group__calib3d.html)
|
||||
- [ ] [validateDisparity](https://docs.opencv.org/master/d9/d0c/group__calib3d.html)
|
||||
|
||||
- [ ] **Fisheye - WORK STARTED** The following functions still need implementation:
|
||||
- [ ] [calibrate](https://docs.opencv.org/master/db/d58/group__calib3d__fisheye.html#gad626a78de2b1dae7489e152a5a5a89e1)
|
||||
- [ ] [distortPoints](https://docs.opencv.org/master/db/d58/group__calib3d__fisheye.html#ga75d8877a98e38d0b29b6892c5f8d7765)
|
||||
- [ ] [estimateNewCameraMatrixForUndistortRectify](https://docs.opencv.org/master/db/d58/group__calib3d__fisheye.html#ga384940fdf04c03e362e94b6eb9b673c9)
|
||||
- [ ] [projectPoints](https://docs.opencv.org/master/db/d58/group__calib3d__fisheye.html#gab1ad1dc30c42ee1a50ce570019baf2c4)
|
||||
- [ ] [stereoCalibrate](https://docs.opencv.org/master/db/d58/group__calib3d__fisheye.html#gadbb3a6ca6429528ef302c784df47949b)
|
||||
- [ ] [stereoRectify](https://docs.opencv.org/master/db/d58/group__calib3d__fisheye.html#gac1af58774006689056b0f2ef1db55ecc)
|
||||
- [ ] [undistortPoints](https://docs.opencv.org/master/db/d58/group__calib3d__fisheye.html#gab738cdf90ceee97b2b52b0d0e7511541)
|
||||
|
||||
- [ ] **features2d. 2D Features Framework - WORK STARTED**
|
||||
- [X] **Feature Detection and Description**
|
||||
|
||||
+2
-2
@@ -8,7 +8,7 @@ platform:
|
||||
environment:
|
||||
GOPATH: c:\gopath
|
||||
GOROOT: c:\go
|
||||
GOVERSION: 1.13
|
||||
GOVERSION: 1.14
|
||||
TEST_EXTERNAL: 1
|
||||
APPVEYOR_SAVE_CACHE_ON_ERROR: true
|
||||
|
||||
@@ -18,7 +18,7 @@ cache:
|
||||
install:
|
||||
- if not exist "C:\opencv" appveyor_build_opencv.cmd
|
||||
- set PATH=C:\Perl\site\bin;C:\Perl\bin;C:\Windows\system32;C:\Windows;C:\Windows\System32\Wbem;C:\Windows\System32\WindowsPowerShell\v1.0\;C:\Program Files\7-Zip;C:\Program Files\Microsoft\Web Platform Installer\;C:\Tools\PsTools;C:\Program Files (x86)\CMake\bin;C:\go\bin;C:\Tools\NuGet;C:\Program Files\LLVM\bin;C:\Tools\curl\bin;C:\ProgramData\chocolatey\bin;C:\Program Files (x86)\Yarn\bin;C:\Users\appveyor\AppData\Local\Yarn\bin;C:\Program Files\AppVeyor\BuildAgent\
|
||||
- set PATH=%PATH%;C:\mingw-w64\x86_64-6.3.0-posix-seh-rt_v5-rev1\mingw64\bin
|
||||
- set PATH=%PATH%;C:\mingw-w64\x86_64-7.3.0-posix-seh-rt_v5-rev0\mingw64\bin
|
||||
- set PATH=%PATH%;C:\Tools\GitVersion;C:\Program Files\Git LFS;C:\Program Files\Git\cmd;C:\Program Files\Git\usr\bin;C:\opencv\build\install\x64\mingw\bin;
|
||||
- echo %PATH%
|
||||
- echo %GOPATH%
|
||||
|
||||
+10
-10
@@ -2,22 +2,22 @@ if not exist "C:\opencv" mkdir "C:\opencv"
|
||||
if not exist "C:\opencv\build" mkdir "C:\opencv\build"
|
||||
if not exist "C:\opencv\testdata" mkdir "C:\opencv\testdata"
|
||||
|
||||
appveyor DownloadFile https://github.com/opencv/opencv/archive/4.2.0.zip -FileName c:\opencv\opencv-4.2.0.zip
|
||||
7z x c:\opencv\opencv-4.2.0.zip -oc:\opencv -y
|
||||
del c:\opencv\opencv-4.2.0.zip /q
|
||||
appveyor DownloadFile https://github.com/opencv/opencv_contrib/archive/4.2.0.zip -FileName c:\opencv\opencv_contrib-4.2.0.zip
|
||||
7z x c:\opencv\opencv_contrib-4.2.0.zip -oc:\opencv -y
|
||||
del c:\opencv\opencv_contrib-4.2.0.zip /q
|
||||
appveyor DownloadFile https://github.com/opencv/opencv/archive/4.4.0.zip -FileName c:\opencv\opencv-4.4.0.zip
|
||||
7z x c:\opencv\opencv-4.4.0.zip -oc:\opencv -y
|
||||
del c:\opencv\opencv-4.4.0.zip /q
|
||||
appveyor DownloadFile https://github.com/opencv/opencv_contrib/archive/4.4.0.zip -FileName c:\opencv\opencv_contrib-4.4.0.zip
|
||||
7z x c:\opencv\opencv_contrib-4.4.0.zip -oc:\opencv -y
|
||||
del c:\opencv\opencv_contrib-4.4.0.zip /q
|
||||
cd C:\opencv\build
|
||||
set PATH=C:\Perl\site\bin;C:\Perl\bin;C:\Windows\system32;C:\Windows;C:\Windows\System32\Wbem;C:\Windows\System32\WindowsPowerShell\v1.0\;C:\Program Files\7-Zip;C:\Program Files\Microsoft\Web Platform Installer\;C:\Tools\PsTools;C:\Program Files (x86)\CMake\bin;C:\go\bin;C:\Tools\NuGet;C:\Program Files\LLVM\bin;C:\Tools\curl\bin;C:\ProgramData\chocolatey\bin;C:\Program Files (x86)\Yarn\bin;C:\Users\appveyor\AppData\Local\Yarn\bin;C:\Program Files\AppVeyor\BuildAgent\
|
||||
set PATH=%PATH%;C:\mingw-w64\x86_64-6.3.0-posix-seh-rt_v5-rev1\mingw64\bin
|
||||
set PATH=%PATH%;C:\mingw-w64\x86_64-7.3.0-posix-seh-rt_v5-rev0\mingw64\bin
|
||||
dir C:\opencv
|
||||
cmake C:\opencv\opencv-4.2.0 -G "MinGW Makefiles" -BC:\opencv\build -DENABLE_CXX11=ON -DOPENCV_EXTRA_MODULES_PATH=C:\opencv\opencv_contrib-4.2.0\modules -DBUILD_SHARED_LIBS=ON -DWITH_IPP=OFF -DWITH_MSMF=OFF -DBUILD_EXAMPLES=OFF -DBUILD_TESTS=OFF -DBUILD_PERF_TESTS=OFF -DBUILD_opencv_java=OFF -DBUILD_opencv_python=OFF -DBUILD_opencv_python2=OFF -DBUILD_opencv_python3=OFF -DBUILD_DOCS=OFF -DENABLE_PRECOMPILED_HEADERS=OFF -DBUILD_opencv_saliency=OFF -DCPU_DISPATCH= -DBUILD_opencv_gapi=OFF -DOPENCV_GENERATE_PKGCONFIG=ON -DOPENCV_ENABLE_NONFREE=ON -DWITH_OPENCL_D3D11_NV=OFF -Wno-dev
|
||||
cmake C:\opencv\opencv-4.4.0 -G "MinGW Makefiles" -BC:\opencv\build -DENABLE_CXX11=ON -DOPENCV_EXTRA_MODULES_PATH=C:\opencv\opencv_contrib-4.4.0\modules -DBUILD_SHARED_LIBS=ON -DWITH_IPP=OFF -DWITH_MSMF=OFF -DBUILD_EXAMPLES=OFF -DBUILD_TESTS=OFF -DBUILD_PERF_TESTS=OFF -DBUILD_opencv_java=OFF -DBUILD_opencv_python=OFF -DBUILD_opencv_python2=OFF -DBUILD_opencv_python3=OFF -DBUILD_DOCS=OFF -DENABLE_PRECOMPILED_HEADERS=OFF -DBUILD_opencv_saliency=OFF -DCPU_DISPATCH= -DBUILD_opencv_gapi=OFF -DOPENCV_GENERATE_PKGCONFIG=ON -DOPENCV_ENABLE_NONFREE=ON -DWITH_OPENCL_D3D11_NV=OFF -DOPENCV_ALLOCATOR_STATS_COUNTER_TYPE=int64_t -Wno-dev
|
||||
mingw32-make -j%NUMBER_OF_PROCESSORS%
|
||||
mingw32-make install
|
||||
appveyor DownloadFile https://raw.githubusercontent.com/opencv/opencv_extra/master/testdata/dnn/bvlc_googlenet.prototxt -FileName C:\opencv\testdata\bvlc_googlenet.prototxt
|
||||
appveyor DownloadFile http://dl.caffe.berkeleyvision.org/bvlc_googlenet.caffemodel -FileName C:\opencv\testdata\bvlc_googlenet.caffemodel
|
||||
appveyor DownloadFile https://storage.googleapis.com/download.tensorflow.org/models/inception5h.zip -FileName C:\opencv\testdata\inception5h.zip
|
||||
7z x C:\opencv\testdata\inception5h.zip -oC:\opencv\testdata tensorflow_inception_graph.pb -y
|
||||
rmdir c:\opencv\opencv-4.2.0 /s /q
|
||||
rmdir c:\opencv\opencv_contrib-4.2.0 /s /q
|
||||
rmdir c:\opencv\opencv-4.4.0 /s /q
|
||||
rmdir c:\opencv\opencv_contrib-4.4.0 /s /q
|
||||
|
||||
+36
@@ -10,6 +10,16 @@ void Fisheye_UndistortImageWithParams(Mat distorted, Mat undistorted, Mat k, Mat
|
||||
cv::fisheye::undistortImage(*distorted, *undistorted, *k, *d, *knew, sz);
|
||||
}
|
||||
|
||||
void Fisheye_UndistortPoints(Mat distorted, Mat undistorted, Mat k, Mat d, Mat r, Mat p) {
|
||||
cv::fisheye::undistortPoints(*distorted, *undistorted, *k, *d, *r, *p);
|
||||
}
|
||||
|
||||
void Fisheye_EstimateNewCameraMatrixForUndistortRectify(Mat k, Mat d, Size imgSize, Mat r, Mat p, double balance, Size newSize, double fovScale) {
|
||||
cv::Size newSz(newSize.width, newSize.height);
|
||||
cv::Size imgSz(imgSize.width, imgSize.height);
|
||||
cv::fisheye::estimateNewCameraMatrixForUndistortRectify(*k, *d, imgSz, *r, *p, balance, newSz, fovScale);
|
||||
}
|
||||
|
||||
void InitUndistortRectifyMap(Mat cameraMatrix,Mat distCoeffs,Mat r,Mat newCameraMatrix,Size size,int m1type,Mat map1,Mat map2) {
|
||||
cv::Size sz(size.width, size.height);
|
||||
cv::initUndistortRectifyMap(*cameraMatrix,*distCoeffs,*r,*newCameraMatrix,sz,m1type,*map1,*map2);
|
||||
@@ -31,3 +41,29 @@ void Undistort(Mat src, Mat dst, Mat cameraMatrix, Mat distCoeffs, Mat newCamera
|
||||
cv::undistort(*src, *dst, *cameraMatrix, *distCoeffs, *newCameraMatrix);
|
||||
}
|
||||
|
||||
void UndistortPoints(Mat distorted, Mat undistorted, Mat k, Mat d, Mat r, Mat p) {
|
||||
cv::undistortPoints(*distorted, *undistorted, *k, *d, *r, *p);
|
||||
}
|
||||
|
||||
bool FindChessboardCorners(Mat image, Size patternSize, Mat corners, int flags) {
|
||||
cv::Size sz(patternSize.width, patternSize.height);
|
||||
return cv::findChessboardCorners(*image, sz, *corners, flags);
|
||||
}
|
||||
|
||||
void DrawChessboardCorners(Mat image, Size patternSize, Mat corners, bool patternWasFound) {
|
||||
cv::Size sz(patternSize.width, patternSize.height);
|
||||
cv::drawChessboardCorners(*image, sz, *corners, patternWasFound);
|
||||
}
|
||||
|
||||
Mat EstimateAffinePartial2D(Contour2f from, Contour2f to) {
|
||||
std::vector<cv::Point2f> from_pts;
|
||||
for (size_t i = 0; i < from.length; i++) {
|
||||
from_pts.push_back(cv::Point2f(from.points[i].x, from.points[i].y));
|
||||
}
|
||||
std::vector<cv::Point2f> to_pts;
|
||||
for (size_t i = 0; i < to.length; i++) {
|
||||
to_pts.push_back(cv::Point2f(to.points[i].x, to.points[i].y));
|
||||
}
|
||||
|
||||
return new cv::Mat(cv::estimateAffinePartial2D(from_pts, to_pts));
|
||||
}
|
||||
|
||||
+80
@@ -67,6 +67,30 @@ func FisheyeUndistortImageWithParams(distorted Mat, undistorted *Mat, k, d, knew
|
||||
C.Fisheye_UndistortImageWithParams(distorted.Ptr(), undistorted.Ptr(), k.Ptr(), d.Ptr(), knew.Ptr(), sz)
|
||||
}
|
||||
|
||||
// FisheyeUndistortPoints transforms points to compensate for fisheye lens distortion
|
||||
//
|
||||
// For further details, please see:
|
||||
// https://docs.opencv.org/master/db/d58/group__calib3d__fisheye.html#gab738cdf90ceee97b2b52b0d0e7511541
|
||||
func FisheyeUndistortPoints(distorted Mat, undistorted *Mat, k, d, r, p Mat) {
|
||||
C.Fisheye_UndistortPoints(distorted.Ptr(), undistorted.Ptr(), k.Ptr(), d.Ptr(), r.Ptr(), p.Ptr())
|
||||
}
|
||||
|
||||
// EstimateNewCameraMatrixForUndistortRectify estimates new camera matrix for undistortion or rectification.
|
||||
//
|
||||
// For further details, please see:
|
||||
// https://docs.opencv.org/master/db/d58/group__calib3d__fisheye.html#ga384940fdf04c03e362e94b6eb9b673c9
|
||||
func EstimateNewCameraMatrixForUndistortRectify(k, d Mat, imgSize image.Point, r Mat, p *Mat, balance float64, newSize image.Point, fovScale float64) {
|
||||
imgSz := C.struct_Size{
|
||||
width: C.int(imgSize.X),
|
||||
height: C.int(imgSize.Y),
|
||||
}
|
||||
newSz := C.struct_Size{
|
||||
width: C.int(newSize.X),
|
||||
height: C.int(newSize.Y),
|
||||
}
|
||||
C.Fisheye_EstimateNewCameraMatrixForUndistortRectify(k.Ptr(), d.Ptr(), imgSz, r.Ptr(), p.Ptr(), C.double(balance), newSz, C.double(fovScale))
|
||||
}
|
||||
|
||||
// InitUndistortRectifyMap computes the joint undistortion and rectification transformation and represents the result in the form of maps for remap
|
||||
//
|
||||
// For further details, please see:
|
||||
@@ -101,3 +125,59 @@ func GetOptimalNewCameraMatrixWithParams(cameraMatrix Mat, distCoeffs Mat, image
|
||||
func Undistort(src Mat, dst *Mat, cameraMatrix Mat, distCoeffs Mat, newCameraMatrix Mat) {
|
||||
C.Undistort(src.Ptr(), dst.Ptr(), cameraMatrix.Ptr(), distCoeffs.Ptr(), newCameraMatrix.Ptr())
|
||||
}
|
||||
|
||||
// UndistortPoints transforms points to compensate for lens distortion
|
||||
//
|
||||
// For further details, please see:
|
||||
// https://docs.opencv.org/master/d9/d0c/group__calib3d.html#ga55c716492470bfe86b0ee9bf3a1f0f7e
|
||||
func UndistortPoints(src Mat, dst *Mat, cameraMatrix, distCoeffs, rectificationTransform, newCameraMatrix Mat) {
|
||||
C.UndistortPoints(src.Ptr(), dst.Ptr(), cameraMatrix.Ptr(), distCoeffs.Ptr(), rectificationTransform.Ptr(), newCameraMatrix.Ptr())
|
||||
}
|
||||
|
||||
// CalibCBFlag value for chessboard calibration
|
||||
// For more details, please see:
|
||||
// https://docs.opencv.org/master/d9/d0c/group__calib3d.html#ga93efa9b0aa890de240ca32b11253dd4a
|
||||
type CalibCBFlag int
|
||||
|
||||
const (
|
||||
// Various operation flags that can be zero or a combination of the following values:
|
||||
// Use adaptive thresholding to convert the image to black and white, rather than a fixed threshold level (computed from the average image brightness).
|
||||
CalibCBAdaptiveThresh CalibCBFlag = 1 << iota
|
||||
// Normalize the image gamma with equalizeHist before applying fixed or adaptive thresholding.
|
||||
CalibCBNormalizeImage
|
||||
// Use additional criteria (like contour area, perimeter, square-like shape) to filter out false quads extracted at the contour retrieval stage.
|
||||
CalibCBFilterQuads
|
||||
// Run a fast check on the image that looks for chessboard corners, and shortcut the call if none is found. This can drastically speed up the call in the degenerate condition when no chessboard is observed.
|
||||
CalibCBFastCheck
|
||||
CalibCBExhaustive
|
||||
CalibCBAccuracy
|
||||
CalibCBLarger
|
||||
CalibCBMarker
|
||||
)
|
||||
|
||||
func FindChessboardCorners(image Mat, patternSize image.Point, corners *Mat, flags CalibCBFlag) bool {
|
||||
sz := C.struct_Size{
|
||||
width: C.int(patternSize.X),
|
||||
height: C.int(patternSize.Y),
|
||||
}
|
||||
return bool(C.FindChessboardCorners(image.Ptr(), sz, corners.Ptr(), C.int(flags)))
|
||||
}
|
||||
|
||||
func DrawChessboardCorners(image *Mat, patternSize image.Point, corners Mat, patternWasFound bool) {
|
||||
sz := C.struct_Size{
|
||||
width: C.int(patternSize.X),
|
||||
height: C.int(patternSize.Y),
|
||||
}
|
||||
C.DrawChessboardCorners(image.Ptr(), sz, corners.Ptr(), C.bool(patternWasFound))
|
||||
}
|
||||
|
||||
// EstimateAffinePartial2D computes an optimal limited affine transformation
|
||||
// with 4 degrees of freedom between two 2D point sets.
|
||||
//
|
||||
// For further details, please see:
|
||||
// https://docs.opencv.org/master/d9/d0c/group__calib3d.html#gad767faff73e9cbd8b9d92b955b50062d
|
||||
func EstimateAffinePartial2D(from, to []Point2f) Mat {
|
||||
fromPoints := toCPoints2f(from)
|
||||
toPoints := toCPoints2f(to)
|
||||
return newMat(C.EstimateAffinePartial2D(fromPoints, toPoints))
|
||||
}
|
||||
|
||||
+7
-1
@@ -14,12 +14,18 @@ extern "C" {
|
||||
//Calib
|
||||
void Fisheye_UndistortImage(Mat distorted, Mat undistorted, Mat k, Mat d);
|
||||
void Fisheye_UndistortImageWithParams(Mat distorted, Mat undistorted, Mat k, Mat d, Mat knew, Size size);
|
||||
void Fisheye_UndistortPoints(Mat distorted, Mat undistorted, Mat k, Mat d, Mat R, Mat P);
|
||||
void Fisheye_EstimateNewCameraMatrixForUndistortRectify(Mat k, Mat d, Size imgSize, Mat r, Mat p, double balance, Size newSize, double fovScale);
|
||||
|
||||
void InitUndistortRectifyMap(Mat cameraMatrix,Mat distCoeffs,Mat r,Mat newCameraMatrix,Size size,int m1type,Mat map1,Mat map2);
|
||||
Mat GetOptimalNewCameraMatrixWithParams(Mat cameraMatrix,Mat distCoeffs,Size size,double alpha,Size newImgSize,Rect* validPixROI,bool centerPrincipalPoint);
|
||||
void Undistort(Mat src, Mat dst, Mat cameraMatrix, Mat distCoeffs, Mat newCameraMatrix);
|
||||
void UndistortPoints(Mat distorted, Mat undistorted, Mat k, Mat d, Mat r, Mat p);
|
||||
bool FindChessboardCorners(Mat image, Size patternSize, Mat corners, int flags);
|
||||
void DrawChessboardCorners(Mat image, Size patternSize, Mat corners, bool patternWasFound);
|
||||
Mat EstimateAffinePartial2D(Contour2f from, Contour2f to);
|
||||
#ifdef __cplusplus
|
||||
}
|
||||
#endif
|
||||
|
||||
#endif //_OPENCV3_CALIB_H
|
||||
#endif //_OPENCV3_CALIB_H
|
||||
+22
@@ -25,3 +25,25 @@ func (c CalibFlag) String() string {
|
||||
}
|
||||
return ""
|
||||
}
|
||||
|
||||
func (c CalibCBFlag) String() string {
|
||||
switch c {
|
||||
case CalibCBAdaptiveThresh:
|
||||
return "calib-cb-adaptive-thresh"
|
||||
case CalibCBNormalizeImage:
|
||||
return "calib-cb-normalize-image"
|
||||
case CalibCBFilterQuads:
|
||||
return "calib-cb-filter-quads"
|
||||
case CalibCBFastCheck:
|
||||
return "calib-cb-fast-check"
|
||||
case CalibCBExhaustive:
|
||||
return "calib-cb-exhaustive"
|
||||
case CalibCBAccuracy:
|
||||
return "calib-cb-accuracy"
|
||||
case CalibCBLarger:
|
||||
return "calib-cb-larger"
|
||||
case CalibCBMarker:
|
||||
return "calib-cb-marker"
|
||||
}
|
||||
return ""
|
||||
}
|
||||
|
||||
+2
-2
@@ -1,4 +1,4 @@
|
||||
// +build !customenv,!openvino
|
||||
// +build !customenv
|
||||
|
||||
package gocv
|
||||
|
||||
@@ -8,6 +8,6 @@ package gocv
|
||||
#cgo !windows pkg-config: opencv4
|
||||
#cgo CXXFLAGS: --std=c++11
|
||||
#cgo windows CPPFLAGS: -IC:/opencv/build/install/include
|
||||
#cgo windows LDFLAGS: -LC:/opencv/build/install/x64/mingw/lib -lopencv_core420 -lopencv_face420 -lopencv_videoio420 -lopencv_imgproc420 -lopencv_highgui420 -lopencv_imgcodecs420 -lopencv_objdetect420 -lopencv_features2d420 -lopencv_video420 -lopencv_dnn420 -lopencv_xfeatures2d420 -lopencv_plot420 -lopencv_tracking420 -lopencv_img_hash420 -lopencv_calib3d420
|
||||
#cgo windows LDFLAGS: -LC:/opencv/build/install/x64/mingw/lib -lopencv_core440 -lopencv_face440 -lopencv_videoio440 -lopencv_imgproc440 -lopencv_highgui440 -lopencv_imgcodecs440 -lopencv_objdetect440 -lopencv_features2d440 -lopencv_video440 -lopencv_dnn440 -lopencv_xfeatures2d440 -lopencv_plot440 -lopencv_tracking440 -lopencv_img_hash440 -lopencv_calib3d440 -lopencv_bgsegm440
|
||||
*/
|
||||
import "C"
|
||||
|
||||
+7
@@ -574,6 +574,10 @@ void Mat_Multiply(Mat src1, Mat src2, Mat dst) {
|
||||
cv::multiply(*src1, *src2, *dst);
|
||||
}
|
||||
|
||||
void Mat_MultiplyWithParams(Mat src1, Mat src2, Mat dst, double scale, int dtype) {
|
||||
cv::multiply(*src1, *src2, *dst, scale, dtype);
|
||||
}
|
||||
|
||||
void Mat_Normalize(Mat src, Mat dst, double alpha, double beta, int typ) {
|
||||
cv::normalize(*src, *dst, alpha, beta, typ);
|
||||
}
|
||||
@@ -761,3 +765,6 @@ Mat Mat_colRange(Mat m,int startrow,int endrow) {
|
||||
return new cv::Mat(m->colRange(startrow,endrow));
|
||||
}
|
||||
|
||||
void IntVector_Close(struct IntVector ivec) {
|
||||
delete[] ivec.val;
|
||||
}
|
||||
|
||||
+109
-45
@@ -35,25 +35,25 @@ const (
|
||||
MatTypeCV8U MatType = 0
|
||||
|
||||
// MatTypeCV8S is a Mat of 8-bit signed int
|
||||
MatTypeCV8S = 1
|
||||
MatTypeCV8S MatType = 1
|
||||
|
||||
// MatTypeCV16U is a Mat of 16-bit unsigned int
|
||||
MatTypeCV16U = 2
|
||||
MatTypeCV16U MatType = 2
|
||||
|
||||
// MatTypeCV16S is a Mat of 16-bit signed int
|
||||
MatTypeCV16S = 3
|
||||
MatTypeCV16S MatType = 3
|
||||
|
||||
// MatTypeCV16SC2 is a Mat of 16-bit signed int with 2 channels
|
||||
MatTypeCV16SC2 = MatTypeCV16S + MatChannels2
|
||||
|
||||
// MatTypeCV32S is a Mat of 32-bit signed int
|
||||
MatTypeCV32S = 4
|
||||
MatTypeCV32S MatType = 4
|
||||
|
||||
// MatTypeCV32F is a Mat of 32-bit float
|
||||
MatTypeCV32F = 5
|
||||
MatTypeCV32F MatType = 5
|
||||
|
||||
// MatTypeCV64F is a Mat of 64-bit float
|
||||
MatTypeCV64F = 6
|
||||
MatTypeCV64F MatType = 6
|
||||
|
||||
// MatTypeCV8UC1 is a Mat of 8-bit unsigned int with a single channel
|
||||
MatTypeCV8UC1 = MatTypeCV8U + MatChannels1
|
||||
@@ -146,21 +146,26 @@ const (
|
||||
CompareEQ CompareType = 0
|
||||
|
||||
// CompareGT src1 is greater than src2.
|
||||
CompareGT = 1
|
||||
CompareGT CompareType = 1
|
||||
|
||||
// CompareGE src1 is greater than or equal to src2.
|
||||
CompareGE = 2
|
||||
CompareGE CompareType = 2
|
||||
|
||||
// CompareLT src1 is less than src2.
|
||||
CompareLT = 3
|
||||
CompareLT CompareType = 3
|
||||
|
||||
// CompareLE src1 is less than or equal to src2.
|
||||
CompareLE = 4
|
||||
CompareLE CompareType = 4
|
||||
|
||||
// CompareNE src1 is unequal to src2.
|
||||
CompareNE = 5
|
||||
CompareNE CompareType = 5
|
||||
)
|
||||
|
||||
type Point2f struct {
|
||||
X float32
|
||||
Y float32
|
||||
}
|
||||
|
||||
var ErrEmptyByteSlice = errors.New("empty byte array")
|
||||
|
||||
// Mat represents an n-dimensional dense numerical single-channel
|
||||
@@ -287,6 +292,7 @@ func (m *Mat) Total() int {
|
||||
func (m *Mat) Size() (dims []int) {
|
||||
cdims := C.IntVector{}
|
||||
C.Mat_Size(m.p, &cdims)
|
||||
defer C.IntVector_Close(cdims)
|
||||
|
||||
h := &reflect.SliceHeader{
|
||||
Data: uintptr(unsafe.Pointer(cdims.val)),
|
||||
@@ -953,7 +959,7 @@ func BitwiseXorWithMask(src1 Mat, src2 Mat, dst *Mat, mask Mat) {
|
||||
// For further details, please see:
|
||||
// https://docs.opencv.org/master/d2/de8/group__core__array.html#ga4ba778a1c57f83233b1d851c83f5a622
|
||||
//
|
||||
func BatchDistance(src1 Mat, src2 Mat, dist Mat, dtype int, nidx Mat, normType int, K int, mask Mat, update int, crosscheck bool) {
|
||||
func BatchDistance(src1 Mat, src2 Mat, dist Mat, dtype MatType, nidx Mat, normType NormType, K int, mask Mat, update int, crosscheck bool) {
|
||||
C.Mat_BatchDistance(src1.p, src2.p, dist.p, C.int(dtype), nidx.p, C.int(normType), C.int(K), mask.p, C.int(update), C.bool(crosscheck))
|
||||
}
|
||||
|
||||
@@ -979,19 +985,19 @@ const (
|
||||
CovarScrambled CovarFlags = 0
|
||||
|
||||
// CovarNormal indicates to use normal covariation.
|
||||
CovarNormal = 1
|
||||
CovarNormal CovarFlags = 1
|
||||
|
||||
// CovarUseAvg indicates to use average covariation.
|
||||
CovarUseAvg = 2
|
||||
CovarUseAvg CovarFlags = 2
|
||||
|
||||
// CovarScale indicates to use scaled covariation.
|
||||
CovarScale = 4
|
||||
CovarScale CovarFlags = 4
|
||||
|
||||
// CovarRows indicates to use covariation on rows.
|
||||
CovarRows = 8
|
||||
CovarRows CovarFlags = 8
|
||||
|
||||
// CovarCols indicates to use covariation on columns.
|
||||
CovarCols = 16
|
||||
CovarCols CovarFlags = 16
|
||||
)
|
||||
|
||||
// CalcCovarMatrix calculates the covariance matrix of a set of vectors.
|
||||
@@ -999,7 +1005,7 @@ const (
|
||||
// For further details, please see:
|
||||
// https://docs.opencv.org/master/d2/de8/group__core__array.html#ga017122d912af19d7d0d2cccc2d63819f
|
||||
//
|
||||
func CalcCovarMatrix(samples Mat, covar *Mat, mean *Mat, flags CovarFlags, ctype int) {
|
||||
func CalcCovarMatrix(samples Mat, covar *Mat, mean *Mat, flags CovarFlags, ctype MatType) {
|
||||
C.Mat_CalcCovarMatrix(samples.p, covar.p, mean.p, C.int(flags), C.int(ctype))
|
||||
}
|
||||
|
||||
@@ -1087,24 +1093,24 @@ const (
|
||||
DftForward DftFlags = 0
|
||||
|
||||
// DftInverse performs an inverse 1D or 2D transform.
|
||||
DftInverse = 1
|
||||
DftInverse DftFlags = 1
|
||||
|
||||
// DftScale scales the result: divide it by the number of array elements. Normally, it is combined with DFT_INVERSE.
|
||||
DftScale = 2
|
||||
DftScale DftFlags = 2
|
||||
|
||||
// DftRows performs a forward or inverse transform of every individual row of the input matrix.
|
||||
DftRows = 4
|
||||
DftRows DftFlags = 4
|
||||
|
||||
// DftComplexOutput performs a forward transformation of 1D or 2D real array; the result, though being a complex array, has complex-conjugate symmetry
|
||||
DftComplexOutput = 16
|
||||
DftComplexOutput DftFlags = 16
|
||||
|
||||
// DftRealOutput performs an inverse transformation of a 1D or 2D complex array; the result is normally a complex array of the same size,
|
||||
// however, if the input array has conjugate-complex symmetry (for example, it is a result of forward transformation with DFT_COMPLEX_OUTPUT flag),
|
||||
// the output is a real array.
|
||||
DftRealOutput = 32
|
||||
DftRealOutput DftFlags = 32
|
||||
|
||||
// DftComplexInput specifies that input is complex input. If this flag is set, the input must have 2 channels.
|
||||
DftComplexInput = 64
|
||||
DftComplexInput DftFlags = 64
|
||||
|
||||
// DctInverse performs an inverse 1D or 2D dct transform.
|
||||
DctInverse = DftInverse
|
||||
@@ -1254,9 +1260,9 @@ const (
|
||||
// Rotate90Clockwise allows to rotate image 90 degrees clockwise
|
||||
Rotate90Clockwise RotateFlag = 0
|
||||
// Rotate180Clockwise allows to rotate image 180 degrees clockwise
|
||||
Rotate180Clockwise = 1
|
||||
Rotate180Clockwise RotateFlag = 1
|
||||
// Rotate90CounterClockwise allows to rotate 270 degrees clockwise
|
||||
Rotate90CounterClockwise = 2
|
||||
Rotate90CounterClockwise RotateFlag = 2
|
||||
)
|
||||
|
||||
// Rotate rotates a 2D array in multiples of 90 degrees
|
||||
@@ -1347,10 +1353,10 @@ const (
|
||||
// KMeansRandomCenters selects random initial centers in each attempt.
|
||||
KMeansRandomCenters KMeansFlags = 0
|
||||
// KMeansPPCenters uses kmeans++ center initialization by Arthur and Vassilvitskii [Arthur2007].
|
||||
KMeansPPCenters = 1
|
||||
KMeansPPCenters KMeansFlags = 1
|
||||
// KMeansUseInitialLabels uses the user-supplied lables during the first (and possibly the only) attempt
|
||||
// instead of computing them from the initial centers. For the second and further attempts, use the random or semi-random // centers. Use one of KMEANS_*_CENTERS flag to specify the exact method.
|
||||
KMeansUseInitialLabels = 2
|
||||
KMeansUseInitialLabels KMeansFlags = 2
|
||||
)
|
||||
|
||||
// KMeans finds centers of clusters and groups input samples around the clusters.
|
||||
@@ -1491,6 +1497,16 @@ func Multiply(src1 Mat, src2 Mat, dst *Mat) {
|
||||
C.Mat_Multiply(src1.p, src2.p, dst.p)
|
||||
}
|
||||
|
||||
// MultiplyWithParams calculates the per-element scaled product of two arrays.
|
||||
// Both input arrays must be of the same size and the same type.
|
||||
//
|
||||
// For further details, please see:
|
||||
// https://docs.opencv.org/master/d2/de8/group__core__array.html#ga979d898a58d7f61c53003e162e7ad89f
|
||||
//
|
||||
func MultiplyWithParams(src1 Mat, src2 Mat, dst *Mat, scale float64, dtype MatType) {
|
||||
C.Mat_MultiplyWithParams(src1.p, src2.p, dst.p, C.double(scale), C.int(dtype))
|
||||
}
|
||||
|
||||
// NormType for normalization operations.
|
||||
//
|
||||
// For further details, please see:
|
||||
@@ -1503,28 +1519,28 @@ const (
|
||||
NormInf NormType = 1
|
||||
|
||||
// NormL1 indicates use L1 normalization.
|
||||
NormL1 = 2
|
||||
NormL1 NormType = 2
|
||||
|
||||
// NormL2 indicates use L2 normalization.
|
||||
NormL2 = 4
|
||||
NormL2 NormType = 4
|
||||
|
||||
// NormL2Sqr indicates use L2 squared normalization.
|
||||
NormL2Sqr = 5
|
||||
NormL2Sqr NormType = 5
|
||||
|
||||
// NormHamming indicates use Hamming normalization.
|
||||
NormHamming = 6
|
||||
NormHamming NormType = 6
|
||||
|
||||
// NormHamming2 indicates use Hamming 2-bit normalization.
|
||||
NormHamming2 = 7
|
||||
NormHamming2 NormType = 7
|
||||
|
||||
// NormTypeMask indicates use type mask for normalization.
|
||||
NormTypeMask = 7
|
||||
NormTypeMask NormType = 7
|
||||
|
||||
// NormRelative indicates use relative normalization.
|
||||
NormRelative = 8
|
||||
NormRelative NormType = 8
|
||||
|
||||
// NormMinMax indicates use min/max normalization.
|
||||
NormMinMax = 32
|
||||
NormMinMax NormType = 32
|
||||
)
|
||||
|
||||
// Normalize normalizes the norm or value range of an array.
|
||||
@@ -1566,35 +1582,35 @@ const (
|
||||
Count TermCriteriaType = 1
|
||||
|
||||
// MaxIter is the maximum number of iterations or elements to compute.
|
||||
MaxIter = 1
|
||||
MaxIter TermCriteriaType = 1
|
||||
|
||||
// EPS is the desired accuracy or change in parameters at which the
|
||||
// iterative algorithm stops.
|
||||
EPS = 2
|
||||
EPS TermCriteriaType = 2
|
||||
)
|
||||
|
||||
type SolveDecompositionFlags int
|
||||
|
||||
const (
|
||||
// Gaussian elimination with the optimal pivot element chosen.
|
||||
SolveDecompositionLu = 0
|
||||
SolveDecompositionLu SolveDecompositionFlags = 0
|
||||
|
||||
// Singular value decomposition (SVD) method. The system can be over-defined and/or the matrix src1 can be singular.
|
||||
SolveDecompositionSvd = 1
|
||||
SolveDecompositionSvd SolveDecompositionFlags = 1
|
||||
|
||||
// Eigenvalue decomposition. The matrix src1 must be symmetrical.
|
||||
SolveDecompositionEing = 2
|
||||
SolveDecompositionEing SolveDecompositionFlags = 2
|
||||
|
||||
// Cholesky LL^T factorization. The matrix src1 must be symmetrical and positively defined.
|
||||
SolveDecompositionCholesky = 3
|
||||
SolveDecompositionCholesky SolveDecompositionFlags = 3
|
||||
|
||||
// QR factorization. The system can be over-defined and/or the matrix src1 can be singular.
|
||||
SolveDecompositionQr = 4
|
||||
SolveDecompositionQr SolveDecompositionFlags = 4
|
||||
|
||||
// While all the previous flags are mutually exclusive, this flag can be used together with any of the previous.
|
||||
// It means that the normal equations 𝚜𝚛𝚌𝟷^T⋅𝚜𝚛𝚌𝟷⋅𝚍𝚜𝚝=𝚜𝚛𝚌𝟷^T𝚜𝚛𝚌𝟸 are solved instead of the original system
|
||||
// 𝚜𝚛𝚌𝟷⋅𝚍𝚜𝚝=𝚜𝚛𝚌𝟸.
|
||||
SolveDecompositionNormal = 5
|
||||
SolveDecompositionNormal SolveDecompositionFlags = 5
|
||||
)
|
||||
|
||||
// Solve solves one or more linear systems or least-squares problems.
|
||||
@@ -1645,7 +1661,7 @@ const (
|
||||
// For further details, please see:
|
||||
// https://docs.opencv.org/master/d2/de8/group__core__array.html#ga4b78072a303f29d9031d56e5638da78e
|
||||
//
|
||||
func Reduce(src Mat, dst *Mat, dim int, rType ReduceTypes, dType int) {
|
||||
func Reduce(src Mat, dst *Mat, dim int, rType ReduceTypes, dType MatType) {
|
||||
C.Mat_Reduce(src.p, dst.p, C.int(dim), C.int(rType), C.int(dType))
|
||||
}
|
||||
|
||||
@@ -1718,6 +1734,7 @@ func SortIdx(src Mat, dst *Mat, flags SortFlags) {
|
||||
func Split(src Mat) (mv []Mat) {
|
||||
cMats := C.struct_Mats{}
|
||||
C.Mat_Split(src.p, &(cMats))
|
||||
defer C.Mats_Close(cMats)
|
||||
mv = make([]Mat, cMats.length)
|
||||
for i := C.int(0); i < cMats.length; i++ {
|
||||
mv[i].p = C.Mats_get(cMats, i)
|
||||
@@ -1844,6 +1861,22 @@ type DMatch struct {
|
||||
Distance float64
|
||||
}
|
||||
|
||||
// Vecb is a generic vector of bytes.
|
||||
type Vecb []uint8
|
||||
|
||||
// GetVecbAt returns a vector of bytes. Its size corresponds to the number
|
||||
// of channels of the Mat.
|
||||
func (m *Mat) GetVecbAt(row int, col int) Vecb {
|
||||
ch := m.Channels()
|
||||
v := make(Vecb, ch)
|
||||
|
||||
for c := 0; c < ch; c++ {
|
||||
v[c] = m.GetUCharAt(row, col*ch+c)
|
||||
}
|
||||
|
||||
return v
|
||||
}
|
||||
|
||||
// Vecf is a generic vector of floats.
|
||||
type Vecf []float32
|
||||
|
||||
@@ -1860,6 +1893,22 @@ func (m *Mat) GetVecfAt(row int, col int) Vecf {
|
||||
return v
|
||||
}
|
||||
|
||||
// Vecd is a generic vector of float64/doubles.
|
||||
type Vecd []float64
|
||||
|
||||
// GetVecdAt returns a vector of float64s. Its size corresponds to the number
|
||||
// of channels of the Mat.
|
||||
func (m *Mat) GetVecdAt(row int, col int) Vecd {
|
||||
ch := m.Channels()
|
||||
v := make(Vecd, ch)
|
||||
|
||||
for c := 0; c < ch; c++ {
|
||||
v[c] = m.GetDoubleAt(row, col*ch+c)
|
||||
}
|
||||
|
||||
return v
|
||||
}
|
||||
|
||||
// Veci is a generic vector of integers.
|
||||
type Veci []int32
|
||||
|
||||
@@ -1944,6 +1993,21 @@ func toCPoints(points []image.Point) C.struct_Points {
|
||||
}
|
||||
}
|
||||
|
||||
func toCPoints2f(points []Point2f) C.struct_Points2f {
|
||||
cPointSlice := make([]C.struct_Point2f, len(points))
|
||||
for i, point := range points {
|
||||
cPointSlice[i] = C.struct_Point2f{
|
||||
x: C.float(point.X),
|
||||
y: C.float(point.Y),
|
||||
}
|
||||
}
|
||||
|
||||
return C.struct_Points2f{
|
||||
points: (*C.Point2f)(&cPointSlice[0]),
|
||||
length: C.int(len(points)),
|
||||
}
|
||||
}
|
||||
|
||||
func toCStrings(strs []string) C.struct_CStrings {
|
||||
cStringsSlice := make([]*C.char, len(strs))
|
||||
for i, s := range strs {
|
||||
|
||||
+12
@@ -56,9 +56,18 @@ typedef struct Points {
|
||||
int length;
|
||||
} Points;
|
||||
|
||||
// Wrapper for the vector of Point2f structs aka std::vector<Point2f>
|
||||
typedef struct Points2f {
|
||||
Point2f* points;
|
||||
int length;
|
||||
} Points2f;
|
||||
|
||||
// Contour is alias for Points
|
||||
typedef Points Contour;
|
||||
|
||||
// Contour2f is alias for Points2f
|
||||
typedef Points2f Contour2f;
|
||||
|
||||
// Wrapper for the vector of Points vectors aka std::vector< std::vector<Point> >
|
||||
typedef struct Contours {
|
||||
Contour* contours;
|
||||
@@ -347,6 +356,7 @@ void Mat_MinMaxIdx(Mat m, double* minVal, double* maxVal, int* minIdx, int* maxI
|
||||
void Mat_MinMaxLoc(Mat m, double* minVal, double* maxVal, Point* minLoc, Point* maxLoc);
|
||||
void Mat_MulSpectrums(Mat a, Mat b, Mat c, int flags);
|
||||
void Mat_Multiply(Mat src1, Mat src2, Mat dst);
|
||||
void Mat_MultiplyWithParams(Mat src1, Mat src2, Mat dst, double scale, int dtype);
|
||||
void Mat_Subtract(Mat src1, Mat src2, Mat dst);
|
||||
void Mat_Normalize(Mat src, Mat dst, double alpha, double beta, int typ);
|
||||
double Norm(Mat src1, int normType);
|
||||
@@ -378,6 +388,8 @@ double GetTickFrequency();
|
||||
Mat Mat_rowRange(Mat m,int startrow,int endrow);
|
||||
Mat Mat_colRange(Mat m,int startrow,int endrow);
|
||||
|
||||
void IntVector_Close(struct IntVector ivec);
|
||||
|
||||
#ifdef __cplusplus
|
||||
}
|
||||
#endif
|
||||
|
||||
-6
@@ -113,12 +113,6 @@ Mat Net_BlobFromImage(Mat image, double scalefactor, Size size, Scalar mean, boo
|
||||
|
||||
// set the output ddepth to the input image depth
|
||||
int ddepth = image->depth();
|
||||
if (ddepth == CV_8U)
|
||||
{
|
||||
// no scalar mean adjustment allowed, so ignore
|
||||
return new cv::Mat(cv::dnn::blobFromImage(*image, scalefactor, sz, NULL, swapRB, crop, ddepth));
|
||||
}
|
||||
|
||||
cv::Scalar cm(mean.val1, mean.val2, mean.val3, mean.val4);
|
||||
return new cv::Mat(cv::dnn::blobFromImage(*image, scalefactor, sz, cm, swapRB, crop, ddepth));
|
||||
}
|
||||
|
||||
+19
-1
@@ -39,6 +39,9 @@ const (
|
||||
|
||||
// NetBackendVKCOM is the Vulkan backend.
|
||||
NetBackendVKCOM NetBackendType = 4
|
||||
|
||||
// NetBackendCUDA is the Cuda backend.
|
||||
NetBackendCUDA NetBackendType = 5
|
||||
)
|
||||
|
||||
// ParseNetBackend returns a valid NetBackendType given a string. Valid values are:
|
||||
@@ -46,6 +49,7 @@ const (
|
||||
// - openvino
|
||||
// - opencv
|
||||
// - vulkan
|
||||
// - cuda
|
||||
// - default
|
||||
func ParseNetBackend(backend string) NetBackendType {
|
||||
switch backend {
|
||||
@@ -57,6 +61,8 @@ func ParseNetBackend(backend string) NetBackendType {
|
||||
return NetBackendOpenCV
|
||||
case "vulkan":
|
||||
return NetBackendVKCOM
|
||||
case "cuda":
|
||||
return NetBackendCUDA
|
||||
default:
|
||||
return NetBackendDefault
|
||||
}
|
||||
@@ -83,6 +89,12 @@ const (
|
||||
|
||||
// NetTargetFPGA is the FPGA target.
|
||||
NetTargetFPGA NetTargetType = 5
|
||||
|
||||
// NetTargetCUDA is the CUDA target.
|
||||
NetTargetCUDA NetTargetType = 6
|
||||
|
||||
// NetTargetCUDAFP16 is the CUDA target.
|
||||
NetTargetCUDAFP16 NetTargetType = 7
|
||||
)
|
||||
|
||||
// ParseNetTarget returns a valid NetTargetType given a string. Valid values are:
|
||||
@@ -92,6 +104,8 @@ const (
|
||||
// - vpu
|
||||
// - vulkan
|
||||
// - fpga
|
||||
// - cuda
|
||||
// - cudafp16
|
||||
func ParseNetTarget(target string) NetTargetType {
|
||||
switch target {
|
||||
case "cpu":
|
||||
@@ -106,6 +120,10 @@ func ParseNetTarget(target string) NetTargetType {
|
||||
return NetTargetVulkan
|
||||
case "fpga":
|
||||
return NetTargetFPGA
|
||||
case "cuda":
|
||||
return NetTargetCUDA
|
||||
case "cudafp16":
|
||||
return NetTargetCUDAFP16
|
||||
default:
|
||||
return NetTargetCPU
|
||||
}
|
||||
@@ -307,7 +325,7 @@ func BlobFromImage(img Mat, scaleFactor float64, size image.Point, mean Scalar,
|
||||
// https://docs.opencv.org/master/d6/d0f/group__dnn.html#ga2b89ed84432e4395f5a1412c2926293c
|
||||
//
|
||||
func BlobFromImages(imgs []Mat, blob *Mat, scaleFactor float64, size image.Point, mean Scalar,
|
||||
swapRB bool, crop bool, ddepth int) {
|
||||
swapRB bool, crop bool, ddepth MatType) {
|
||||
|
||||
cMatArray := make([]C.Mat, len(imgs))
|
||||
for i, r := range imgs {
|
||||
|
||||
+6
@@ -12,6 +12,8 @@ func (c NetBackendType) String() string {
|
||||
return "opencv"
|
||||
case NetBackendVKCOM:
|
||||
return "vulkan"
|
||||
case NetBackendCUDA:
|
||||
return "cuda"
|
||||
}
|
||||
return ""
|
||||
}
|
||||
@@ -30,6 +32,10 @@ func (c NetTargetType) String() string {
|
||||
return "vulkan"
|
||||
case NetTargetFPGA:
|
||||
return "fpga"
|
||||
case NetTargetCUDA:
|
||||
return "cuda"
|
||||
case NetTargetCUDAFP16:
|
||||
return "cudafp16"
|
||||
}
|
||||
return ""
|
||||
}
|
||||
|
||||
+43
@@ -428,3 +428,46 @@ void DrawKeyPoints(Mat src, struct KeyPoints kp, Mat dst, Scalar s, int flags) {
|
||||
|
||||
cv::drawKeypoints(*src, keypts, *dst, color, static_cast<cv::DrawMatchesFlags>(flags));
|
||||
}
|
||||
|
||||
SIFT SIFT_Create() {
|
||||
// TODO: params
|
||||
return new cv::Ptr<cv::SIFT>(cv::SIFT::create());
|
||||
}
|
||||
|
||||
void SIFT_Close(SIFT d) {
|
||||
delete d;
|
||||
}
|
||||
|
||||
struct KeyPoints SIFT_Detect(SIFT d, Mat src) {
|
||||
std::vector<cv::KeyPoint> detected;
|
||||
(*d)->detect(*src, detected);
|
||||
|
||||
KeyPoint* kps = new KeyPoint[detected.size()];
|
||||
|
||||
for (size_t i = 0; i < detected.size(); ++i) {
|
||||
KeyPoint k = {detected[i].pt.x, detected[i].pt.y, detected[i].size, detected[i].angle,
|
||||
detected[i].response, detected[i].octave, detected[i].class_id
|
||||
};
|
||||
kps[i] = k;
|
||||
}
|
||||
|
||||
KeyPoints ret = {kps, (int)detected.size()};
|
||||
return ret;
|
||||
}
|
||||
|
||||
struct KeyPoints SIFT_DetectAndCompute(SIFT d, Mat src, Mat mask, Mat desc) {
|
||||
std::vector<cv::KeyPoint> detected;
|
||||
(*d)->detectAndCompute(*src, *mask, detected, *desc);
|
||||
|
||||
KeyPoint* kps = new KeyPoint[detected.size()];
|
||||
|
||||
for (size_t i = 0; i < detected.size(); ++i) {
|
||||
KeyPoint k = {detected[i].pt.x, detected[i].pt.y, detected[i].size, detected[i].angle,
|
||||
detected[i].response, detected[i].octave, detected[i].class_id
|
||||
};
|
||||
kps[i] = k;
|
||||
}
|
||||
|
||||
KeyPoints ret = {kps, (int)detected.size()};
|
||||
return ret;
|
||||
}
|
||||
|
||||
+54
-7
@@ -149,9 +149,9 @@ const (
|
||||
//FastFeatureDetectorType58 is an alias of FastFeatureDetector::TYPE_5_8
|
||||
FastFeatureDetectorType58 FastFeatureDetectorType = 0
|
||||
//FastFeatureDetectorType712 is an alias of FastFeatureDetector::TYPE_7_12
|
||||
FastFeatureDetectorType712 = 1
|
||||
FastFeatureDetectorType712 FastFeatureDetectorType = 1
|
||||
//FastFeatureDetectorType916 is an alias of FastFeatureDetector::TYPE_9_16
|
||||
FastFeatureDetectorType916 = 2
|
||||
FastFeatureDetectorType916 FastFeatureDetectorType = 2
|
||||
)
|
||||
|
||||
// FastFeatureDetector is a wrapper around the cv::FastFeatureDetector.
|
||||
@@ -710,11 +710,11 @@ const (
|
||||
// DrawDefault creates new image and for each keypoint only the center point will be drawn
|
||||
DrawDefault DrawMatchesFlag = 0
|
||||
// DrawOverOutImg draws matches on existing content of image
|
||||
DrawOverOutImg = 1
|
||||
DrawOverOutImg DrawMatchesFlag = 1
|
||||
// NotDrawSinglePoints will not draw single points
|
||||
NotDrawSinglePoints = 2
|
||||
NotDrawSinglePoints DrawMatchesFlag = 2
|
||||
// DrawRichKeyPoints draws the circle around each keypoint with keypoint size and orientation
|
||||
DrawRichKeyPoints = 3
|
||||
DrawRichKeyPoints DrawMatchesFlag = 3
|
||||
)
|
||||
|
||||
// DrawKeyPoints draws keypoints
|
||||
@@ -740,11 +740,58 @@ func DrawKeyPoints(src Mat, keyPoints []KeyPoint, dst *Mat, color color.RGBA, fl
|
||||
}
|
||||
|
||||
scalar := C.struct_Scalar{
|
||||
val1: C.double(color.R),
|
||||
val1: C.double(color.B),
|
||||
val2: C.double(color.G),
|
||||
val3: C.double(color.B),
|
||||
val3: C.double(color.R),
|
||||
val4: C.double(color.A),
|
||||
}
|
||||
|
||||
C.DrawKeyPoints(src.p, cKeyPoints, dst.p, scalar, C.int(flag))
|
||||
}
|
||||
|
||||
// SIFT is a wrapper around the cv::SIFT algorithm.
|
||||
// Due to the patent having expired, this is now in the main OpenCV code modules.
|
||||
type SIFT struct {
|
||||
// C.SIFT
|
||||
p unsafe.Pointer
|
||||
}
|
||||
|
||||
// NewSIFT returns a new SIFT algorithm.
|
||||
//
|
||||
// For further details, please see:
|
||||
// https://docs.opencv.org/master/d5/d3c/classcv_1_1xfeatures2d_1_1SIFT.html
|
||||
//
|
||||
func NewSIFT() SIFT {
|
||||
return SIFT{p: unsafe.Pointer(C.SIFT_Create())}
|
||||
}
|
||||
|
||||
// Close SIFT.
|
||||
func (d *SIFT) Close() error {
|
||||
C.SIFT_Close((C.SIFT)(d.p))
|
||||
d.p = nil
|
||||
return nil
|
||||
}
|
||||
|
||||
// Detect keypoints in an image using SIFT.
|
||||
//
|
||||
// For further details, please see:
|
||||
// https://docs.opencv.org/master/d0/d13/classcv_1_1Feature2D.html#aa4e9a7082ec61ebc108806704fbd7887
|
||||
//
|
||||
func (d *SIFT) Detect(src Mat) []KeyPoint {
|
||||
ret := C.SIFT_Detect((C.SIFT)(d.p), C.Mat(src.Ptr()))
|
||||
|
||||
return getKeyPoints(ret)
|
||||
}
|
||||
|
||||
// DetectAndCompute detects and computes keypoints in an image using SIFT.
|
||||
//
|
||||
// For further details, please see:
|
||||
// https://docs.opencv.org/master/d0/d13/classcv_1_1Feature2D.html#a8be0d1c20b08eb867184b8d74c15a677
|
||||
//
|
||||
func (d *SIFT) DetectAndCompute(src Mat, mask Mat) ([]KeyPoint, Mat) {
|
||||
desc := NewMat()
|
||||
ret := C.SIFT_DetectAndCompute((C.SIFT)(d.p), C.Mat(src.Ptr()), C.Mat(mask.Ptr()),
|
||||
C.Mat(desc.Ptr()))
|
||||
|
||||
return getKeyPoints(ret), desc
|
||||
}
|
||||
|
||||
+7
@@ -19,6 +19,7 @@ typedef cv::Ptr<cv::MSER>* MSER;
|
||||
typedef cv::Ptr<cv::ORB>* ORB;
|
||||
typedef cv::Ptr<cv::SimpleBlobDetector>* SimpleBlobDetector;
|
||||
typedef cv::Ptr<cv::BFMatcher>* BFMatcher;
|
||||
typedef cv::Ptr<cv::SIFT>* SIFT;
|
||||
#else
|
||||
typedef void* AKAZE;
|
||||
typedef void* AgastFeatureDetector;
|
||||
@@ -30,6 +31,7 @@ typedef void* MSER;
|
||||
typedef void* ORB;
|
||||
typedef void* SimpleBlobDetector;
|
||||
typedef void* BFMatcher;
|
||||
typedef void* SIFT;
|
||||
#endif
|
||||
|
||||
AKAZE AKAZE_Create();
|
||||
@@ -82,6 +84,11 @@ struct MultiDMatches BFMatcher_KnnMatch(BFMatcher b, Mat query, Mat train, int k
|
||||
|
||||
void DrawKeyPoints(Mat src, struct KeyPoints kp, Mat dst, const Scalar s, int flags);
|
||||
|
||||
SIFT SIFT_Create();
|
||||
void SIFT_Close(SIFT f);
|
||||
struct KeyPoints SIFT_Detect(SIFT f, Mat src);
|
||||
struct KeyPoints SIFT_DetectAndCompute(SIFT f, Mat src, Mat mask, Mat desc);
|
||||
|
||||
#ifdef __cplusplus
|
||||
}
|
||||
#endif
|
||||
|
||||
+1
-1
@@ -1,3 +1,3 @@
|
||||
module gocv.io/x/gocv
|
||||
|
||||
go 1.13
|
||||
go 1.13
|
||||
|
||||
+11
-11
@@ -67,19 +67,19 @@ type WindowFlag float32
|
||||
|
||||
const (
|
||||
// WindowNormal indicates a normal window.
|
||||
WindowNormal WindowFlag = 0
|
||||
|
||||
// WindowFullscreen indicates a full-screen window.
|
||||
WindowFullscreen = 1
|
||||
WindowNormal WindowFlag = 0x00000000
|
||||
|
||||
// WindowAutosize indicates a window sized based on the contents.
|
||||
WindowAutosize = 1
|
||||
WindowAutosize WindowFlag = 0x00000001
|
||||
|
||||
// WindowFullscreen indicates a full-screen window.
|
||||
WindowFullscreen WindowFlag = 1
|
||||
|
||||
// WindowFreeRatio indicates allow the user to resize without maintaining aspect ratio.
|
||||
WindowFreeRatio = 0x00000100
|
||||
WindowFreeRatio WindowFlag = 0x00000100
|
||||
|
||||
// WindowKeepRatio indicates always maintain an aspect ratio that matches the contents.
|
||||
WindowKeepRatio = 0
|
||||
WindowKeepRatio WindowFlag = 0x00000000
|
||||
)
|
||||
|
||||
// WindowPropertyFlag flags for SetWindowProperty / GetWindowProperty.
|
||||
@@ -92,17 +92,17 @@ const (
|
||||
|
||||
// WindowPropertyAutosize is autosize property
|
||||
// (can be WINDOW_NORMAL or WINDOW_AUTOSIZE).
|
||||
WindowPropertyAutosize = 1
|
||||
WindowPropertyAutosize WindowPropertyFlag = 1
|
||||
|
||||
// WindowPropertyAspectRatio window's aspect ration
|
||||
// (can be set to WINDOW_FREERATIO or WINDOW_KEEPRATIO).
|
||||
WindowPropertyAspectRatio = 2
|
||||
WindowPropertyAspectRatio WindowPropertyFlag = 2
|
||||
|
||||
// WindowPropertyOpenGL opengl support.
|
||||
WindowPropertyOpenGL = 3
|
||||
WindowPropertyOpenGL WindowPropertyFlag = 3
|
||||
|
||||
// WindowPropertyVisible or not.
|
||||
WindowPropertyVisible = 4
|
||||
WindowPropertyVisible WindowPropertyFlag = 4
|
||||
)
|
||||
|
||||
// GetWindowProperty returns properties of a window.
|
||||
|
||||
+16
-12
@@ -19,48 +19,52 @@ const (
|
||||
|
||||
// IMReadGrayScale always convert image to the single channel
|
||||
// grayscale image.
|
||||
IMReadGrayScale = 0
|
||||
IMReadGrayScale IMReadFlag = 0
|
||||
|
||||
// IMReadColor always converts image to the 3 channel BGR color image.
|
||||
IMReadColor = 1
|
||||
IMReadColor IMReadFlag = 1
|
||||
|
||||
// IMReadAnyDepth returns 16-bit/32-bit image when the input has the corresponding
|
||||
// depth, otherwise convert it to 8-bit.
|
||||
IMReadAnyDepth = 2
|
||||
IMReadAnyDepth IMReadFlag = 2
|
||||
|
||||
// IMReadAnyColor the image is read in any possible color format.
|
||||
IMReadAnyColor = 4
|
||||
IMReadAnyColor IMReadFlag = 4
|
||||
|
||||
// IMReadLoadGDAL uses the gdal driver for loading the image.
|
||||
IMReadLoadGDAL = 8
|
||||
IMReadLoadGDAL IMReadFlag = 8
|
||||
|
||||
// IMReadReducedGrayscale2 always converts image to the single channel grayscale image
|
||||
// and the image size reduced 1/2.
|
||||
IMReadReducedGrayscale2 = 16
|
||||
IMReadReducedGrayscale2 IMReadFlag = 16
|
||||
|
||||
// IMReadReducedColor2 always converts image to the 3 channel BGR color image and the
|
||||
// image size reduced 1/2.
|
||||
IMReadReducedColor2 = 17
|
||||
IMReadReducedColor2 IMReadFlag = 17
|
||||
|
||||
// IMReadReducedGrayscale4 always converts image to the single channel grayscale image and
|
||||
// the image size reduced 1/4.
|
||||
IMReadReducedGrayscale4 = 32
|
||||
IMReadReducedGrayscale4 IMReadFlag = 32
|
||||
|
||||
// IMReadReducedColor4 always converts image to the 3 channel BGR color image and
|
||||
// the image size reduced 1/4.
|
||||
IMReadReducedColor4 = 33
|
||||
IMReadReducedColor4 IMReadFlag = 33
|
||||
|
||||
// IMReadReducedGrayscale8 always convert image to the single channel grayscale image and
|
||||
// the image size reduced 1/8.
|
||||
IMReadReducedGrayscale8 = 64
|
||||
IMReadReducedGrayscale8 IMReadFlag = 64
|
||||
|
||||
// IMReadReducedColor8 always convert image to the 3 channel BGR color image and the
|
||||
// image size reduced 1/8.
|
||||
IMReadReducedColor8 = 65
|
||||
IMReadReducedColor8 IMReadFlag = 65
|
||||
|
||||
// IMReadIgnoreOrientation do not rotate the image according to EXIF's orientation flag.
|
||||
IMReadIgnoreOrientation = 128
|
||||
IMReadIgnoreOrientation IMReadFlag = 128
|
||||
)
|
||||
|
||||
// TODO: Define IMWriteFlag type?
|
||||
|
||||
const (
|
||||
//IMWriteJpegQuality is the quality from 0 to 100 for JPEG (the higher is the better). Default value is 95.
|
||||
IMWriteJpegQuality = 1
|
||||
|
||||
|
||||
+88
-2
@@ -168,6 +168,12 @@ void Erode(Mat src, Mat dst, Mat kernel) {
|
||||
cv::erode(*src, *dst, *kernel);
|
||||
}
|
||||
|
||||
void ErodeWithParams(Mat src, Mat dst, Mat kernel, Point anchor, int iterations, int borderType) {
|
||||
cv::Point pt1(anchor.x, anchor.y);
|
||||
|
||||
cv::erode(*src, *dst, *kernel, pt1, iterations, borderType, cv::morphologyDefaultBorderValue());
|
||||
}
|
||||
|
||||
void MatchTemplate(Mat image, Mat templ, Mat result, int method, Mat mask) {
|
||||
cv::matchTemplate(*image, *templ, *result, method, *mask);
|
||||
}
|
||||
@@ -317,6 +323,10 @@ void GaussianBlur(Mat src, Mat dst, Size ps, double sX, double sY, int bt) {
|
||||
cv::GaussianBlur(*src, *dst, sz, sX, sY, bt);
|
||||
}
|
||||
|
||||
Mat GetGaussianKernel(int ksize, double sigma, int ktype){
|
||||
return new cv::Mat(cv::getGaussianKernel(ksize, sigma, ktype));
|
||||
}
|
||||
|
||||
void Laplacian(Mat src, Mat dst, int dDepth, int kSize, double scale, double delta,
|
||||
int borderType) {
|
||||
cv::Laplacian(*src, *dst, dDepth, kSize, scale, delta, borderType);
|
||||
@@ -382,8 +392,8 @@ void Integral(Mat src, Mat sum, Mat sqsum, Mat tilted) {
|
||||
cv::integral(*src, *sum, *sqsum, *tilted);
|
||||
}
|
||||
|
||||
void Threshold(Mat src, Mat dst, double thresh, double maxvalue, int typ) {
|
||||
cv::threshold(*src, *dst, thresh, maxvalue, typ);
|
||||
double Threshold(Mat src, Mat dst, double thresh, double maxvalue, int typ) {
|
||||
return cv::threshold(*src, *dst, thresh, maxvalue, typ);
|
||||
}
|
||||
|
||||
void AdaptiveThreshold(Mat src, Mat dst, double maxValue, int adaptiveMethod, int thresholdType,
|
||||
@@ -463,6 +473,26 @@ void FillPoly(Mat img, Contours points, Scalar color) {
|
||||
cv::fillPoly(*img, pts, c);
|
||||
}
|
||||
|
||||
void Polylines(Mat img, Contours points, bool isClosed, Scalar color,int thickness) {
|
||||
std::vector<std::vector<cv::Point> > pts;
|
||||
|
||||
for (size_t i = 0; i < points.length; i++) {
|
||||
Contour contour = points.contours[i];
|
||||
|
||||
std::vector<cv::Point> cntr;
|
||||
|
||||
for (size_t i = 0; i < contour.length; i++) {
|
||||
cntr.push_back(cv::Point(contour.points[i].x, contour.points[i].y));
|
||||
}
|
||||
|
||||
pts.push_back(cntr);
|
||||
}
|
||||
|
||||
cv::Scalar c = cv::Scalar(color.val1, color.val2, color.val3, color.val4);
|
||||
|
||||
cv::polylines(*img, pts, isClosed, c, thickness);
|
||||
}
|
||||
|
||||
struct Size GetTextSize(const char* text, int fontFace, double fontScale, int thickness) {
|
||||
cv::Size sz = cv::getTextSize(text, fontFace, fontScale, thickness, NULL);
|
||||
Size size = {sz.width, sz.height};
|
||||
@@ -529,6 +559,19 @@ void ApplyCustomColorMap(Mat src, Mat dst, Mat colormap) {
|
||||
}
|
||||
|
||||
Mat GetPerspectiveTransform(Contour src, Contour dst) {
|
||||
std::vector<cv::Point2f> src_pts;
|
||||
for (size_t i = 0; i < src.length; i++) {
|
||||
src_pts.push_back(cv::Point2f(src.points[i].x, src.points[i].y));
|
||||
}
|
||||
std::vector<cv::Point2f> dst_pts;
|
||||
for (size_t i = 0; i < dst.length; i++) {
|
||||
dst_pts.push_back(cv::Point2f(dst.points[i].x, dst.points[i].y));
|
||||
}
|
||||
|
||||
return new cv::Mat(cv::getPerspectiveTransform(src_pts, dst_pts));
|
||||
}
|
||||
|
||||
Mat GetPerspectiveTransform2f(Contour2f src, Contour2f dst) {
|
||||
std::vector<cv::Point2f> src_pts;
|
||||
|
||||
for (size_t i = 0; i < src.length; i++) {
|
||||
@@ -544,6 +587,39 @@ Mat GetPerspectiveTransform(Contour src, Contour dst) {
|
||||
return new cv::Mat(cv::getPerspectiveTransform(src_pts, dst_pts));
|
||||
}
|
||||
|
||||
Mat GetAffineTransform(Contour src, Contour dst) {
|
||||
std::vector<cv::Point2f> src_pts;
|
||||
for (size_t i = 0; i < src.length; i++) {
|
||||
src_pts.push_back(cv::Point2f(src.points[i].x, src.points[i].y));
|
||||
}
|
||||
std::vector<cv::Point2f> dst_pts;
|
||||
for (size_t i = 0; i < dst.length; i++) {
|
||||
dst_pts.push_back(cv::Point2f(dst.points[i].x, dst.points[i].y));
|
||||
}
|
||||
|
||||
return new cv::Mat(cv::getAffineTransform(src_pts, dst_pts));
|
||||
}
|
||||
|
||||
Mat GetAffineTransform2f(Contour2f src, Contour2f dst) {
|
||||
std::vector<cv::Point2f> src_pts;
|
||||
|
||||
for (size_t i = 0; i < src.length; i++) {
|
||||
src_pts.push_back(cv::Point2f(src.points[i].x, src.points[i].y));
|
||||
}
|
||||
|
||||
std::vector<cv::Point2f> dst_pts;
|
||||
|
||||
for (size_t i = 0; i < dst.length; i++) {
|
||||
dst_pts.push_back(cv::Point2f(dst.points[i].x, dst.points[i].y));
|
||||
}
|
||||
|
||||
return new cv::Mat(cv::getAffineTransform(src_pts, dst_pts));
|
||||
}
|
||||
|
||||
Mat FindHomography(Mat src, Mat dst, int method, double ransacReprojThreshold, Mat mask, const int maxIters, const double confidence) {
|
||||
return new cv::Mat(cv::findHomography(*src, *dst, method, ransacReprojThreshold, *mask, maxIters, confidence));
|
||||
}
|
||||
|
||||
void DrawContours(Mat src, Contours contours, int contourIdx, Scalar color, int thickness) {
|
||||
std::vector<std::vector<cv::Point> > cntrs;
|
||||
|
||||
@@ -625,3 +701,13 @@ void CLAHE_Apply(CLAHE c, Mat src, Mat dst) {
|
||||
void InvertAffineTransform(Mat src, Mat dst) {
|
||||
cv::invertAffineTransform(*src, *dst);
|
||||
}
|
||||
|
||||
Point2f PhaseCorrelate(Mat src1, Mat src2, Mat window, double* response) {
|
||||
cv::Point2d result = cv::phaseCorrelate(*src1, *src2, *window, response);
|
||||
|
||||
Point2f result2f = {
|
||||
.x = float(result.x),
|
||||
.y = float(result.y),
|
||||
};
|
||||
return result2f;
|
||||
}
|
||||
|
||||
+242
-100
@@ -178,22 +178,22 @@ const (
|
||||
HistCmpCorrel HistCompMethod = 0
|
||||
|
||||
// HistCmpChiSqr calculates the Chi-Square
|
||||
HistCmpChiSqr = 1
|
||||
HistCmpChiSqr HistCompMethod = 1
|
||||
|
||||
// HistCmpIntersect calculates the Intersection
|
||||
HistCmpIntersect = 2
|
||||
HistCmpIntersect HistCompMethod = 2
|
||||
|
||||
// HistCmpBhattacharya applies the HistCmpBhattacharya by calculating the Bhattacharya distance.
|
||||
HistCmpBhattacharya = 3
|
||||
HistCmpBhattacharya HistCompMethod = 3
|
||||
|
||||
// HistCmpHellinger applies the HistCmpBhattacharya comparison. It is a synonym to HistCmpBhattacharya.
|
||||
HistCmpHellinger = HistCmpBhattacharya
|
||||
|
||||
// HistCmpChiSqrAlt applies the Alternative Chi-Square (regularly used for texture comparsion).
|
||||
HistCmpChiSqrAlt = 4
|
||||
HistCmpChiSqrAlt HistCompMethod = 4
|
||||
|
||||
// HistCmpKlDiv applies the Kullback-Liebler divergence comparison.
|
||||
HistCmpKlDiv = 5
|
||||
HistCmpKlDiv HistCompMethod = 5
|
||||
)
|
||||
|
||||
// CompareHist Compares two histograms.
|
||||
@@ -335,6 +335,20 @@ func Erode(src Mat, dst *Mat, kernel Mat) {
|
||||
C.Erode(src.p, dst.p, kernel.p)
|
||||
}
|
||||
|
||||
// ErodeWithParams erodes an image by using a specific structuring element.
|
||||
//
|
||||
// For further details, please see:
|
||||
// https://docs.opencv.org/master/d4/d86/group__imgproc__filter.html#gaeb1e0c1033e3f6b891a25d0511362aeb
|
||||
//
|
||||
func ErodeWithParams(src Mat, dst *Mat, kernel Mat, anchor image.Point, iterations, borderType int) {
|
||||
cAnchor := C.struct_Point{
|
||||
x: C.int(anchor.X),
|
||||
y: C.int(anchor.Y),
|
||||
}
|
||||
|
||||
C.ErodeWithParams(src.p, dst.p, kernel.p, cAnchor, C.int(iterations), C.int(borderType))
|
||||
}
|
||||
|
||||
// RetrievalMode is the mode of the contour retrieval algorithm.
|
||||
type RetrievalMode int
|
||||
|
||||
@@ -345,21 +359,21 @@ const (
|
||||
|
||||
// RetrievalList retrieves all of the contours without establishing
|
||||
// any hierarchical relationships.
|
||||
RetrievalList = 1
|
||||
RetrievalList RetrievalMode = 1
|
||||
|
||||
// RetrievalCComp retrieves all of the contours and organizes them into
|
||||
// a two-level hierarchy. At the top level, there are external boundaries
|
||||
// of the components. At the second level, there are boundaries of the holes.
|
||||
// If there is another contour inside a hole of a connected component, it
|
||||
// is still put at the top level.
|
||||
RetrievalCComp = 2
|
||||
RetrievalCComp RetrievalMode = 2
|
||||
|
||||
// RetrievalTree retrieves all of the contours and reconstructs a full
|
||||
// hierarchy of nested contours.
|
||||
RetrievalTree = 3
|
||||
RetrievalTree RetrievalMode = 3
|
||||
|
||||
// RetrievalFloodfill lacks a description in the original header.
|
||||
RetrievalFloodfill = 4
|
||||
RetrievalFloodfill RetrievalMode = 4
|
||||
)
|
||||
|
||||
// ContourApproximationMode is the mode of the contour approximation algorithm.
|
||||
@@ -375,15 +389,15 @@ const (
|
||||
// ChainApproxSimple compresses horizontal, vertical, and diagonal segments
|
||||
// and leaves only their end points.
|
||||
// For example, an up-right rectangular contour is encoded with 4 points.
|
||||
ChainApproxSimple = 2
|
||||
ChainApproxSimple ContourApproximationMode = 2
|
||||
|
||||
// ChainApproxTC89L1 applies one of the flavors of the Teh-Chin chain
|
||||
// approximation algorithms.
|
||||
ChainApproxTC89L1 = 3
|
||||
ChainApproxTC89L1 ContourApproximationMode = 3
|
||||
|
||||
// ChainApproxTC89KCOS applies one of the flavors of the Teh-Chin chain
|
||||
// approximation algorithms.
|
||||
ChainApproxTC89KCOS = 4
|
||||
ChainApproxTC89KCOS ContourApproximationMode = 4
|
||||
)
|
||||
|
||||
// BoundingRect calculates the up-right bounding rectangle of a point set.
|
||||
@@ -577,10 +591,10 @@ const (
|
||||
CCL_WU ConnectedComponentsAlgorithmType = 0
|
||||
|
||||
// BBDT algorithm for 8-way connectivity, SAUF algorithm for 4-way connectivity.
|
||||
CCL_DEFAULT = 1
|
||||
CCL_DEFAULT ConnectedComponentsAlgorithmType = 1
|
||||
|
||||
// BBDT algorithm for 8-way connectivity, SAUF algorithm for 4-way connectivity
|
||||
CCL_GRANA = 2
|
||||
CCL_GRANA ConnectedComponentsAlgorithmType = 2
|
||||
)
|
||||
|
||||
// ConnectedComponents computes the connected components labeled image of boolean image.
|
||||
@@ -607,21 +621,21 @@ type ConnectedComponentsTypes int
|
||||
|
||||
const (
|
||||
//The leftmost (x) coordinate which is the inclusive start of the bounding box in the horizontal direction.
|
||||
CC_STAT_LEFT = 0
|
||||
CC_STAT_LEFT ConnectedComponentsTypes = 0
|
||||
|
||||
//The topmost (y) coordinate which is the inclusive start of the bounding box in the vertical direction.
|
||||
CC_STAT_TOP = 1
|
||||
CC_STAT_TOP ConnectedComponentsTypes = 1
|
||||
|
||||
// The horizontal size of the bounding box.
|
||||
CC_STAT_WIDTH = 2
|
||||
CC_STAT_WIDTH ConnectedComponentsTypes = 2
|
||||
|
||||
// The vertical size of the bounding box.
|
||||
CC_STAT_HEIGHT = 3
|
||||
CC_STAT_HEIGHT ConnectedComponentsTypes = 3
|
||||
|
||||
// The total area (in pixels) of the connected component.
|
||||
CC_STAT_AREA = 4
|
||||
CC_STAT_AREA ConnectedComponentsTypes = 4
|
||||
|
||||
CC_STAT_MAX = 5
|
||||
CC_STAT_MAX ConnectedComponentsTypes = 5
|
||||
)
|
||||
|
||||
// ConnectedComponentsWithStats computes the connected components labeled image of boolean
|
||||
@@ -654,15 +668,15 @@ const (
|
||||
// TmSqdiff maps to TM_SQDIFF
|
||||
TmSqdiff TemplateMatchMode = 0
|
||||
// TmSqdiffNormed maps to TM_SQDIFF_NORMED
|
||||
TmSqdiffNormed = 1
|
||||
TmSqdiffNormed TemplateMatchMode = 1
|
||||
// TmCcorr maps to TM_CCORR
|
||||
TmCcorr = 2
|
||||
TmCcorr TemplateMatchMode = 2
|
||||
// TmCcorrNormed maps to TM_CCORR_NORMED
|
||||
TmCcorrNormed = 3
|
||||
TmCcorrNormed TemplateMatchMode = 3
|
||||
// TmCcoeff maps to TM_CCOEFF
|
||||
TmCcoeff = 4
|
||||
TmCcoeff TemplateMatchMode = 4
|
||||
// TmCcoeffNormed maps to TM_CCOEFF_NORMED
|
||||
TmCcoeffNormed = 5
|
||||
TmCcoeffNormed TemplateMatchMode = 5
|
||||
)
|
||||
|
||||
// MatchTemplate compares a template against overlapped image regions.
|
||||
@@ -779,10 +793,10 @@ const (
|
||||
MorphRect MorphShape = 0
|
||||
|
||||
// MorphCross is the cross morph shape.
|
||||
MorphCross = 1
|
||||
MorphCross MorphShape = 1
|
||||
|
||||
// MorphEllipse is the ellipse morph shape.
|
||||
MorphEllipse = 2
|
||||
MorphEllipse MorphShape = 2
|
||||
)
|
||||
|
||||
// GetStructuringElement returns a structuring element of the specified size
|
||||
@@ -808,25 +822,25 @@ const (
|
||||
MorphErode MorphType = 0
|
||||
|
||||
// MorphDilate operation
|
||||
MorphDilate = 1
|
||||
MorphDilate MorphType = 1
|
||||
|
||||
// MorphOpen operation
|
||||
MorphOpen = 2
|
||||
MorphOpen MorphType = 2
|
||||
|
||||
// MorphClose operation
|
||||
MorphClose = 3
|
||||
MorphClose MorphType = 3
|
||||
|
||||
// MorphGradient operation
|
||||
MorphGradient = 4
|
||||
MorphGradient MorphType = 4
|
||||
|
||||
// MorphTophat operation
|
||||
MorphTophat = 5
|
||||
MorphTophat MorphType = 5
|
||||
|
||||
// MorphBlackhat operation
|
||||
MorphBlackhat = 6
|
||||
MorphBlackhat MorphType = 6
|
||||
|
||||
// MorphHitmiss operation
|
||||
MorphHitmiss = 7
|
||||
MorphHitmiss MorphType = 7
|
||||
)
|
||||
|
||||
// BorderType type of border.
|
||||
@@ -837,25 +851,25 @@ const (
|
||||
BorderConstant BorderType = 0
|
||||
|
||||
// BorderReplicate border type
|
||||
BorderReplicate = 1
|
||||
BorderReplicate BorderType = 1
|
||||
|
||||
// BorderReflect border type
|
||||
BorderReflect = 2
|
||||
BorderReflect BorderType = 2
|
||||
|
||||
// BorderWrap border type
|
||||
BorderWrap = 3
|
||||
BorderWrap BorderType = 3
|
||||
|
||||
// BorderReflect101 border type
|
||||
BorderReflect101 = 4
|
||||
BorderReflect101 BorderType = 4
|
||||
|
||||
// BorderTransparent border type
|
||||
BorderTransparent = 5
|
||||
BorderTransparent BorderType = 5
|
||||
|
||||
// BorderDefault border type
|
||||
BorderDefault = BorderReflect101
|
||||
|
||||
// BorderIsolated border type
|
||||
BorderIsolated = 16
|
||||
BorderIsolated BorderType = 16
|
||||
)
|
||||
|
||||
// GaussianBlur blurs an image Mat using a Gaussian filter.
|
||||
@@ -875,12 +889,28 @@ func GaussianBlur(src Mat, dst *Mat, ksize image.Point, sigmaX float64,
|
||||
C.GaussianBlur(src.p, dst.p, pSize, C.double(sigmaX), C.double(sigmaY), C.int(borderType))
|
||||
}
|
||||
|
||||
// GetGaussianKernel returns Gaussian filter coefficients.
|
||||
//
|
||||
// For further details, please see:
|
||||
// https://docs.opencv.org/master/d4/d86/group__imgproc__filter.html#gac05a120c1ae92a6060dd0db190a61afa
|
||||
func GetGaussianKernel(ksize int, sigma float64) Mat {
|
||||
return newMat(C.GetGaussianKernel(C.int(ksize), C.double(sigma), C.int(MatTypeCV64F)))
|
||||
}
|
||||
|
||||
// GetGaussianKernelWithParams returns Gaussian filter coefficients.
|
||||
//
|
||||
// For further details, please see:
|
||||
// https://docs.opencv.org/master/d4/d86/group__imgproc__filter.html#gac05a120c1ae92a6060dd0db190a61afa
|
||||
func GetGaussianKernelWithParams(ksize int, sigma float64, ktype MatType) Mat {
|
||||
return newMat(C.GetGaussianKernel(C.int(ksize), C.double(sigma), C.int(ktype)))
|
||||
}
|
||||
|
||||
// Sobel calculates the first, second, third, or mixed image derivatives using an extended Sobel operator
|
||||
//
|
||||
// For further details, please see:
|
||||
// https://docs.opencv.org/master/d4/d86/group__imgproc__filter.html#gacea54f142e81b6758cb6f375ce782c8d
|
||||
//
|
||||
func Sobel(src Mat, dst *Mat, ddepth, dx, dy, ksize int, scale, delta float64, borderType BorderType) {
|
||||
func Sobel(src Mat, dst *Mat, ddepth MatType, dx, dy, ksize int, scale, delta float64, borderType BorderType) {
|
||||
C.Sobel(src.p, dst.p, C.int(ddepth), C.int(dx), C.int(dy), C.int(ksize), C.double(scale), C.double(delta), C.int(borderType))
|
||||
}
|
||||
|
||||
@@ -889,7 +919,7 @@ func Sobel(src Mat, dst *Mat, ddepth, dx, dy, ksize int, scale, delta float64, b
|
||||
// For further details, please see:
|
||||
// https://docs.opencv.org/master/d4/d86/group__imgproc__filter.html#ga405d03b20c782b65a4daf54d233239a2
|
||||
//
|
||||
func SpatialGradient(src Mat, dx, dy *Mat, ksize int, borderType BorderType) {
|
||||
func SpatialGradient(src Mat, dx, dy *Mat, ksize MatType, borderType BorderType) {
|
||||
C.SpatialGradient(src.p, dx.p, dy.p, C.int(ksize), C.int(borderType))
|
||||
}
|
||||
|
||||
@@ -898,7 +928,7 @@ func SpatialGradient(src Mat, dx, dy *Mat, ksize int, borderType BorderType) {
|
||||
// For further details, please see:
|
||||
// https://docs.opencv.org/master/d4/d86/group__imgproc__filter.html#gad78703e4c8fe703d479c1860d76429e6
|
||||
//
|
||||
func Laplacian(src Mat, dst *Mat, dDepth int, size int, scale float64,
|
||||
func Laplacian(src Mat, dst *Mat, dDepth MatType, size int, scale float64,
|
||||
delta float64, borderType BorderType) {
|
||||
C.Laplacian(src.p, dst.p, C.int(dDepth), C.int(size), C.double(scale), C.double(delta), C.int(borderType))
|
||||
}
|
||||
@@ -908,7 +938,7 @@ func Laplacian(src Mat, dst *Mat, dDepth int, size int, scale float64,
|
||||
// For further details, please see:
|
||||
// https://docs.opencv.org/master/d4/d86/group__imgproc__filter.html#gaa13106761eedf14798f37aa2d60404c9
|
||||
//
|
||||
func Scharr(src Mat, dst *Mat, dDepth int, dx int, dy int, scale float64,
|
||||
func Scharr(src Mat, dst *Mat, dDepth MatType, dx int, dy int, scale float64,
|
||||
delta float64, borderType BorderType) {
|
||||
C.Scharr(src.p, dst.p, C.int(dDepth), C.int(dx), C.int(dy), C.double(scale), C.double(delta), C.int(borderType))
|
||||
}
|
||||
@@ -978,12 +1008,12 @@ const (
|
||||
// GCInitWithMask makes the function initialize the state using the provided mask.
|
||||
// GCInitWithMask and GCInitWithRect can be combined.
|
||||
// Then all the pixels outside of the ROI are automatically initialized with GC_BGD.
|
||||
GCInitWithMask = 1
|
||||
GCInitWithMask GrabCutMode = 1
|
||||
// GCEval means that the algorithm should just resume.
|
||||
GCEval = 2
|
||||
GCEval GrabCutMode = 2
|
||||
// GCEvalFreezeModel means that the algorithm should just run a single iteration of the GrabCut algorithm
|
||||
// with the fixed model
|
||||
GCEvalFreezeModel = 3
|
||||
GCEvalFreezeModel GrabCutMode = 3
|
||||
)
|
||||
|
||||
// Grabcut runs the GrabCut algorithm.
|
||||
@@ -1010,15 +1040,15 @@ const (
|
||||
HoughStandard HoughMode = 0
|
||||
// HoughProbabilistic is the probabilistic Hough transform (more efficient
|
||||
// in case if the picture contains a few long linear segments).
|
||||
HoughProbabilistic = 1
|
||||
HoughProbabilistic HoughMode = 1
|
||||
// HoughMultiScale is the multi-scale variant of the classical Hough
|
||||
// transform.
|
||||
HoughMultiScale = 2
|
||||
HoughMultiScale HoughMode = 2
|
||||
// HoughGradient is basically 21HT, described in: HK Yuen, John Princen,
|
||||
// John Illingworth, and Josef Kittler. Comparative study of hough
|
||||
// transform methods for circle finding. Image and Vision Computing,
|
||||
// 8(1):71–77, 1990.
|
||||
HoughGradient = 3
|
||||
HoughGradient HoughMode = 3
|
||||
)
|
||||
|
||||
// HoughCircles finds circles in a grayscale image using the Hough transform.
|
||||
@@ -1098,25 +1128,25 @@ const (
|
||||
ThresholdBinary ThresholdType = 0
|
||||
|
||||
// ThresholdBinaryInv threshold type
|
||||
ThresholdBinaryInv = 1
|
||||
ThresholdBinaryInv ThresholdType = 1
|
||||
|
||||
// ThresholdTrunc threshold type
|
||||
ThresholdTrunc = 2
|
||||
ThresholdTrunc ThresholdType = 2
|
||||
|
||||
// ThresholdToZero threshold type
|
||||
ThresholdToZero = 3
|
||||
ThresholdToZero ThresholdType = 3
|
||||
|
||||
// ThresholdToZeroInv threshold type
|
||||
ThresholdToZeroInv = 4
|
||||
ThresholdToZeroInv ThresholdType = 4
|
||||
|
||||
// ThresholdMask threshold type
|
||||
ThresholdMask = 7
|
||||
ThresholdMask ThresholdType = 7
|
||||
|
||||
// ThresholdOtsu threshold type
|
||||
ThresholdOtsu = 8
|
||||
ThresholdOtsu ThresholdType = 8
|
||||
|
||||
// ThresholdTriangle threshold type
|
||||
ThresholdTriangle = 16
|
||||
ThresholdTriangle ThresholdType = 16
|
||||
)
|
||||
|
||||
// Threshold applies a fixed-level threshold to each array element.
|
||||
@@ -1124,8 +1154,8 @@ const (
|
||||
// For further details, please see:
|
||||
// https://docs.opencv.org/3.3.0/d7/d1b/group__imgproc__misc.html#gae8a4a146d1ca78c626a53577199e9c57
|
||||
//
|
||||
func Threshold(src Mat, dst *Mat, thresh float32, maxvalue float32, typ ThresholdType) {
|
||||
C.Threshold(src.p, dst.p, C.double(thresh), C.double(maxvalue), C.int(typ))
|
||||
func Threshold(src Mat, dst *Mat, thresh float32, maxvalue float32, typ ThresholdType) (threshold float32) {
|
||||
return float32(C.Threshold(src.p, dst.p, C.double(thresh), C.double(maxvalue), C.int(typ)))
|
||||
}
|
||||
|
||||
// AdaptiveThresholdType type of adaptive threshold operation.
|
||||
@@ -1136,7 +1166,7 @@ const (
|
||||
AdaptiveThresholdMean AdaptiveThresholdType = 0
|
||||
|
||||
// AdaptiveThresholdGaussian threshold type
|
||||
AdaptiveThresholdGaussian = 1
|
||||
AdaptiveThresholdGaussian AdaptiveThresholdType = 1
|
||||
)
|
||||
|
||||
// AdaptiveThreshold applies a fixed-level threshold to each array element.
|
||||
@@ -1312,6 +1342,47 @@ func FillPoly(img *Mat, pts [][]image.Point, c color.RGBA) {
|
||||
C.FillPoly(img.p, cPoints, sColor)
|
||||
}
|
||||
|
||||
// Polylines draws several polygonal curves.
|
||||
//
|
||||
// For more information, see:
|
||||
// https://docs.opencv.org/master/d6/d6e/group__imgproc__draw.html#ga1ea127ffbbb7e0bfc4fd6fd2eb64263c
|
||||
func Polylines(img *Mat, pts [][]image.Point, isClosed bool, c color.RGBA, thickness int) {
|
||||
points := make([]C.struct_Points, len(pts))
|
||||
|
||||
for i, pt := range pts {
|
||||
p := (*C.struct_Point)(C.malloc(C.size_t(C.sizeof_struct_Point * len(pt))))
|
||||
defer C.free(unsafe.Pointer(p))
|
||||
|
||||
pa := getPoints(p, len(pt))
|
||||
|
||||
for j, point := range pt {
|
||||
pa[j] = C.struct_Point{
|
||||
x: C.int(point.X),
|
||||
y: C.int(point.Y),
|
||||
}
|
||||
}
|
||||
|
||||
points[i] = C.struct_Points{
|
||||
points: (*C.Point)(p),
|
||||
length: C.int(len(pt)),
|
||||
}
|
||||
}
|
||||
|
||||
cPoints := C.struct_Contours{
|
||||
contours: (*C.struct_Points)(&points[0]),
|
||||
length: C.int(len(pts)),
|
||||
}
|
||||
|
||||
sColor := C.struct_Scalar{
|
||||
val1: C.double(c.B),
|
||||
val2: C.double(c.G),
|
||||
val3: C.double(c.R),
|
||||
val4: C.double(c.A),
|
||||
}
|
||||
|
||||
C.Polylines(img.p, cPoints, C.bool(isClosed), sColor, C.int(thickness))
|
||||
}
|
||||
|
||||
// HersheyFont are the font libraries included in OpenCV.
|
||||
// Only a subset of the available Hershey fonts are supported by OpenCV.
|
||||
//
|
||||
@@ -1324,23 +1395,23 @@ const (
|
||||
// FontHersheySimplex is normal size sans-serif font.
|
||||
FontHersheySimplex HersheyFont = 0
|
||||
// FontHersheyPlain issmall size sans-serif font.
|
||||
FontHersheyPlain = 1
|
||||
FontHersheyPlain HersheyFont = 1
|
||||
// FontHersheyDuplex normal size sans-serif font
|
||||
// (more complex than FontHersheySIMPLEX).
|
||||
FontHersheyDuplex = 2
|
||||
FontHersheyDuplex HersheyFont = 2
|
||||
// FontHersheyComplex i a normal size serif font.
|
||||
FontHersheyComplex = 3
|
||||
FontHersheyComplex HersheyFont = 3
|
||||
// FontHersheyTriplex is a normal size serif font
|
||||
// (more complex than FontHersheyCOMPLEX).
|
||||
FontHersheyTriplex = 4
|
||||
FontHersheyTriplex HersheyFont = 4
|
||||
// FontHersheyComplexSmall is a smaller version of FontHersheyCOMPLEX.
|
||||
FontHersheyComplexSmall = 5
|
||||
FontHersheyComplexSmall HersheyFont = 5
|
||||
// FontHersheyScriptSimplex is a hand-writing style font.
|
||||
FontHersheyScriptSimplex = 6
|
||||
FontHersheyScriptSimplex HersheyFont = 6
|
||||
// FontHersheyScriptComplex is a more complex variant of FontHersheyScriptSimplex.
|
||||
FontHersheyScriptComplex = 7
|
||||
FontHersheyScriptComplex HersheyFont = 7
|
||||
// FontItalic is the flag for italic font.
|
||||
FontItalic = 16
|
||||
FontItalic HersheyFont = 16
|
||||
)
|
||||
|
||||
// LineType are the line libraries included in OpenCV.
|
||||
@@ -1354,11 +1425,11 @@ const (
|
||||
// Filled line
|
||||
Filled LineType = -1
|
||||
// Line4 4-connected line
|
||||
Line4 = 4
|
||||
Line4 LineType = 4
|
||||
// Line8 8-connected line
|
||||
Line8 = 8
|
||||
Line8 LineType = 8
|
||||
// LineAA antialiased line
|
||||
LineAA = 16
|
||||
LineAA LineType = 16
|
||||
)
|
||||
|
||||
// GetTextSize calculates the width and height of a text string.
|
||||
@@ -1441,23 +1512,23 @@ const (
|
||||
InterpolationNearestNeighbor InterpolationFlags = 0
|
||||
|
||||
// InterpolationLinear is bilinear interpolation.
|
||||
InterpolationLinear = 1
|
||||
InterpolationLinear InterpolationFlags = 1
|
||||
|
||||
// InterpolationCubic is bicube interpolation.
|
||||
InterpolationCubic = 2
|
||||
InterpolationCubic InterpolationFlags = 2
|
||||
|
||||
// InterpolationArea uses pixel area relation. It is preferred for image
|
||||
// decimation as it gives moire-free results.
|
||||
InterpolationArea = 3
|
||||
InterpolationArea InterpolationFlags = 3
|
||||
|
||||
// InterpolationLanczos4 is Lanczos interpolation over 8x8 neighborhood.
|
||||
InterpolationLanczos4 = 4
|
||||
InterpolationLanczos4 InterpolationFlags = 4
|
||||
|
||||
// InterpolationDefault is an alias for InterpolationLinear.
|
||||
InterpolationDefault = InterpolationLinear
|
||||
|
||||
// InterpolationMax indicates use maximum interpolation.
|
||||
InterpolationMax = 7
|
||||
InterpolationMax InterpolationFlags = 7
|
||||
)
|
||||
|
||||
// Resize resizes an image.
|
||||
@@ -1571,18 +1642,18 @@ type ColormapTypes int
|
||||
// https://docs.opencv.org/master/d3/d50/group__imgproc__colormap.html#ga9a805d8262bcbe273f16be9ea2055a65
|
||||
const (
|
||||
ColormapAutumn ColormapTypes = 0
|
||||
ColormapBone = 1
|
||||
ColormapJet = 2
|
||||
ColormapWinter = 3
|
||||
ColormapRainbow = 4
|
||||
ColormapOcean = 5
|
||||
ColormapSummer = 6
|
||||
ColormapSpring = 7
|
||||
ColormapCool = 8
|
||||
ColormapHsv = 9
|
||||
ColormapPink = 10
|
||||
ColormapHot = 11
|
||||
ColormapParula = 12
|
||||
ColormapBone ColormapTypes = 1
|
||||
ColormapJet ColormapTypes = 2
|
||||
ColormapWinter ColormapTypes = 3
|
||||
ColormapRainbow ColormapTypes = 4
|
||||
ColormapOcean ColormapTypes = 5
|
||||
ColormapSummer ColormapTypes = 6
|
||||
ColormapSpring ColormapTypes = 7
|
||||
ColormapCool ColormapTypes = 8
|
||||
ColormapHsv ColormapTypes = 9
|
||||
ColormapPink ColormapTypes = 10
|
||||
ColormapHot ColormapTypes = 11
|
||||
ColormapParula ColormapTypes = 12
|
||||
)
|
||||
|
||||
// ApplyColorMap applies a GNU Octave/MATLAB equivalent colormap on a given image.
|
||||
@@ -1602,7 +1673,7 @@ func ApplyCustomColorMap(src Mat, dst *Mat, customColormap Mat) {
|
||||
}
|
||||
|
||||
// GetPerspectiveTransform returns 3x3 perspective transformation for the
|
||||
// corresponding 4 point pairs.
|
||||
// corresponding 4 point pairs as image.Point.
|
||||
//
|
||||
// For further details, please see:
|
||||
// https://docs.opencv.org/master/da/d54/group__imgproc__transform.html#ga8c1ae0e3589a9d77fffc962c49b22043
|
||||
@@ -1612,16 +1683,66 @@ func GetPerspectiveTransform(src, dst []image.Point) Mat {
|
||||
return newMat(C.GetPerspectiveTransform(srcPoints, dstPoints))
|
||||
}
|
||||
|
||||
// GetPerspectiveTransform2f returns 3x3 perspective transformation for the
|
||||
// corresponding 4 point pairs as gocv.Point2f.
|
||||
//
|
||||
// For further details, please see:
|
||||
// https://docs.opencv.org/master/da/d54/group__imgproc__transform.html#ga8c1ae0e3589a9d77fffc962c49b22043
|
||||
func GetPerspectiveTransform2f(src, dst []Point2f) Mat {
|
||||
srcPoints := toCPoints2f(src)
|
||||
dstPoints := toCPoints2f(dst)
|
||||
return newMat(C.GetPerspectiveTransform2f(srcPoints, dstPoints))
|
||||
}
|
||||
|
||||
// GetAffineTransform returns a 2x3 affine transformation matrix for the
|
||||
// corresponding 3 point pairs as image.Point.
|
||||
//
|
||||
// For further details, please see:
|
||||
// https://docs.opencv.org/master/da/d54/group__imgproc__transform.html#ga8f6d378f9f8eebb5cb55cd3ae295a999
|
||||
func GetAffineTransform(src, dst []image.Point) Mat {
|
||||
srcPoints := toCPoints(src)
|
||||
dstPoints := toCPoints(dst)
|
||||
return newMat(C.GetAffineTransform(srcPoints, dstPoints))
|
||||
}
|
||||
|
||||
// GetAffineTransform2f returns a 2x3 affine transformation matrix for the
|
||||
// corresponding 3 point pairs as gocv.Point2f.
|
||||
//
|
||||
// For further details, please see:
|
||||
// https://docs.opencv.org/master/da/d54/group__imgproc__transform.html#ga8f6d378f9f8eebb5cb55cd3ae295a999
|
||||
func GetAffineTransform2f(src, dst []Point2f) Mat {
|
||||
srcPoints := toCPoints2f(src)
|
||||
dstPoints := toCPoints2f(dst)
|
||||
return newMat(C.GetAffineTransform2f(srcPoints, dstPoints))
|
||||
}
|
||||
|
||||
type HomographyMethod int
|
||||
|
||||
const (
|
||||
HomograpyMethodAllPoints HomographyMethod = 0
|
||||
HomograpyMethodLMEDS HomographyMethod = 4
|
||||
HomograpyMethodRANSAC HomographyMethod = 8
|
||||
)
|
||||
|
||||
// FindHomography finds an optimal homography matrix using 4 or more point pairs (as opposed to GetPerspectiveTransform, which uses exactly 4)
|
||||
//
|
||||
// For further details, please see:
|
||||
// https://docs.opencv.org/master/d9/d0c/group__calib3d.html#ga4abc2ece9fab9398f2e560d53c8c9780
|
||||
//
|
||||
func FindHomography(srcPoints Mat, dstPoints *Mat, method HomographyMethod, ransacReprojThreshold float64, mask *Mat, maxIters int, confidence float64) Mat {
|
||||
return newMat(C.FindHomography(srcPoints.Ptr(), dstPoints.Ptr(), C.int(method), C.double(ransacReprojThreshold), mask.Ptr(), C.int(maxIters), C.double(confidence)))
|
||||
}
|
||||
|
||||
// DrawContours draws contours outlines or filled contours.
|
||||
//
|
||||
// For further details, please see:
|
||||
// https://docs.opencv.org/3.3.1/d6/d6e/group__imgproc__draw.html#ga746c0625f1781f1ffc9056259103edbc
|
||||
// https://docs.opencv.org/master/d6/d6e/group__imgproc__draw.html#ga746c0625f1781f1ffc9056259103edbc
|
||||
//
|
||||
func DrawContours(img *Mat, contours [][]image.Point, contourIdx int, c color.RGBA, thickness int) {
|
||||
cntrs := make([]C.struct_Points, len(contours))
|
||||
|
||||
for i, contour := range contours {
|
||||
p := (*C.struct_Point)(C.malloc(C.size_t(C.sizeof_struct_Point * len(contour))))
|
||||
defer C.free(unsafe.Pointer(p))
|
||||
|
||||
pa := getPoints(p, len(contour))
|
||||
|
||||
@@ -1651,6 +1772,12 @@ func DrawContours(img *Mat, contours [][]image.Point, contourIdx int, c color.RG
|
||||
}
|
||||
|
||||
C.DrawContours(img.p, cContours, C.int(contourIdx), sColor, C.int(thickness))
|
||||
|
||||
// now free the contour points
|
||||
for i := 0; i < len(contours); i++ {
|
||||
C.free(unsafe.Pointer(cntrs[i].points))
|
||||
|
||||
}
|
||||
}
|
||||
|
||||
// Remap applies a generic geometrical transformation to an image.
|
||||
@@ -1671,7 +1798,7 @@ func Remap(src Mat, dst, map1, map2 *Mat, interpolation InterpolationFlags, bord
|
||||
//
|
||||
// For further details, please see:
|
||||
// https://docs.opencv.org/master/d4/d86/group__imgproc__filter.html#ga27c049795ce870216ddfb366086b5a04
|
||||
func Filter2D(src Mat, dst *Mat, ddepth int, kernel Mat, anchor image.Point, delta float64, borderType BorderType) {
|
||||
func Filter2D(src Mat, dst *Mat, ddepth MatType, kernel Mat, anchor image.Point, delta float64, borderType BorderType) {
|
||||
anchorP := C.struct_Point{
|
||||
x: C.int(anchor.X),
|
||||
y: C.int(anchor.Y),
|
||||
@@ -1683,7 +1810,7 @@ func Filter2D(src Mat, dst *Mat, ddepth int, kernel Mat, anchor image.Point, del
|
||||
//
|
||||
// For further details, please see:
|
||||
// https://docs.opencv.org/master/d4/d86/group__imgproc__filter.html#ga910e29ff7d7b105057d1625a4bf6318d
|
||||
func SepFilter2D(src Mat, dst *Mat, ddepth int, kernelX, kernelY Mat, anchor image.Point, delta float64, borderType BorderType) {
|
||||
func SepFilter2D(src Mat, dst *Mat, ddepth MatType, kernelX, kernelY Mat, anchor image.Point, delta float64, borderType BorderType) {
|
||||
anchorP := C.struct_Point{
|
||||
x: C.int(anchor.X),
|
||||
y: C.int(anchor.Y),
|
||||
@@ -1723,13 +1850,13 @@ type DistanceTypes int
|
||||
|
||||
const (
|
||||
DistUser DistanceTypes = 0
|
||||
DistL1 = 1
|
||||
DistL2 = 2
|
||||
DistC = 3
|
||||
DistL12 = 4
|
||||
DistFair = 5
|
||||
DistWelsch = 6
|
||||
DistHuber = 7
|
||||
DistL1 DistanceTypes = 1
|
||||
DistL2 DistanceTypes = 2
|
||||
DistC DistanceTypes = 3
|
||||
DistL12 DistanceTypes = 4
|
||||
DistFair DistanceTypes = 5
|
||||
DistWelsch DistanceTypes = 6
|
||||
DistHuber DistanceTypes = 7
|
||||
)
|
||||
|
||||
// FitLine fits a line to a 2D or 3D point set.
|
||||
@@ -1788,3 +1915,18 @@ func (c *CLAHE) Apply(src Mat, dst *Mat) {
|
||||
func InvertAffineTransform(src Mat, dst *Mat) {
|
||||
C.InvertAffineTransform(src.p, dst.p)
|
||||
}
|
||||
|
||||
// Apply phaseCorrelate.
|
||||
//
|
||||
// For further details, please see:
|
||||
// https://docs.opencv.org/master/d7/df3/group__imgproc__motion.html#ga552420a2ace9ef3fb053cd630fdb4952
|
||||
//
|
||||
func PhaseCorrelate(src1, src2, window Mat) (phaseShift Point2f, response float64) {
|
||||
var responseDouble C.double
|
||||
result := C.PhaseCorrelate(src1.p, src2.p, window.p, &responseDouble)
|
||||
|
||||
return Point2f{
|
||||
X: float32(result.x),
|
||||
Y: float32(result.y),
|
||||
}, float64(responseDouble)
|
||||
}
|
||||
|
||||
+9
-1
@@ -32,6 +32,7 @@ void SqBoxFilter(Mat src, Mat dst, int ddepth, Size ps);
|
||||
void Dilate(Mat src, Mat dst, Mat kernel);
|
||||
void DistanceTransform(Mat src, Mat dst, Mat labels, int distanceType, int maskSize, int labelType);
|
||||
void Erode(Mat src, Mat dst, Mat kernel);
|
||||
void ErodeWithParams(Mat src, Mat dst, Mat kernel, Point anchor, int iterations, int borderType);
|
||||
void MatchTemplate(Mat image, Mat templ, Mat result, int method, Mat mask);
|
||||
struct Moment Moments(Mat src, bool binaryImage);
|
||||
void PyrDown(Mat src, Mat dst, Size dstsize, int borderType);
|
||||
@@ -47,6 +48,7 @@ int ConnectedComponents(Mat src, Mat dst, int connectivity, int ltype, int cclty
|
||||
int ConnectedComponentsWithStats(Mat src, Mat labels, Mat stats, Mat centroids, int connectivity, int ltype, int ccltype);
|
||||
|
||||
void GaussianBlur(Mat src, Mat dst, Size ps, double sX, double sY, int bt);
|
||||
Mat GetGaussianKernel(int ksize, double sigma, int ktype);
|
||||
void Laplacian(Mat src, Mat dst, int dDepth, int kSize, double scale, double delta, int borderType);
|
||||
void Scharr(Mat src, Mat dst, int dDepth, int dx, int dy, double scale, double delta,
|
||||
int borderType);
|
||||
@@ -70,7 +72,7 @@ void HoughLinesPointSet(Mat points, Mat lines, int lines_max, int threshold,
|
||||
double min_rho, double max_rho, double rho_step,
|
||||
double min_theta, double max_theta, double theta_step);
|
||||
void Integral(Mat src, Mat sum, Mat sqsum, Mat tilted);
|
||||
void Threshold(Mat src, Mat dst, double thresh, double maxvalue, int typ);
|
||||
double Threshold(Mat src, Mat dst, double thresh, double maxvalue, int typ);
|
||||
void AdaptiveThreshold(Mat src, Mat dst, double maxValue, int adaptiveTyp, int typ, int blockSize,
|
||||
double c);
|
||||
|
||||
@@ -81,6 +83,7 @@ void Ellipse(Mat img, Point center, Point axes, double angle, double
|
||||
void Line(Mat img, Point pt1, Point pt2, Scalar color, int thickness);
|
||||
void Rectangle(Mat img, Rect rect, Scalar color, int thickness);
|
||||
void FillPoly(Mat img, Contours points, Scalar color);
|
||||
void Polylines(Mat img, Contours points, bool isClosed, Scalar color, int thickness);
|
||||
struct Size GetTextSize(const char* text, int fontFace, double fontScale, int thickness);
|
||||
void PutText(Mat img, const char* text, Point org, int fontFace, double fontScale,
|
||||
Scalar color, int thickness);
|
||||
@@ -97,6 +100,10 @@ void Watershed(Mat image, Mat markers);
|
||||
void ApplyColorMap(Mat src, Mat dst, int colormap);
|
||||
void ApplyCustomColorMap(Mat src, Mat dst, Mat colormap);
|
||||
Mat GetPerspectiveTransform(Contour src, Contour dst);
|
||||
Mat GetPerspectiveTransform2f(Contour2f src, Contour2f dst);
|
||||
Mat GetAffineTransform(Contour src, Contour dst);
|
||||
Mat GetAffineTransform2f(Contour2f src, Contour2f dst);
|
||||
Mat FindHomography(Mat src, Mat dst, int method, double ransacReprojThreshold, Mat mask, const int maxIters, const double confidence) ;
|
||||
void DrawContours(Mat src, Contours contours, int contourIdx, Scalar color, int thickness);
|
||||
void Sobel(Mat src, Mat dst, int ddepth, int dx, int dy, int ksize, double scale, double delta, int borderType);
|
||||
void SpatialGradient(Mat src, Mat dx, Mat dy, int ksize, int borderType);
|
||||
@@ -112,6 +119,7 @@ CLAHE CLAHE_CreateWithParams(double clipLimit, Size tileGridSize);
|
||||
void CLAHE_Close(CLAHE c);
|
||||
void CLAHE_Apply(CLAHE c, Mat src, Mat dst);
|
||||
void InvertAffineTransform(Mat src, Mat dst);
|
||||
Point2f PhaseCorrelate(Mat src1, Mat src2, Mat window, double* response);
|
||||
|
||||
#ifdef __cplusplus
|
||||
}
|
||||
|
||||
+137
-137
@@ -12,340 +12,340 @@ const (
|
||||
ColorBGRToBGRA ColorConversionCode = 0
|
||||
|
||||
// ColorBGRAToBGR removes alpha channel from BGR image.
|
||||
ColorBGRAToBGR = 1
|
||||
ColorBGRAToBGR ColorConversionCode = 1
|
||||
|
||||
// ColorBGRToRGBA converts from BGR to RGB with alpha channel.
|
||||
ColorBGRToRGBA = 2
|
||||
ColorBGRToRGBA ColorConversionCode = 2
|
||||
|
||||
// ColorRGBAToBGR converts from RGB with alpha to BGR color space.
|
||||
ColorRGBAToBGR = 3
|
||||
ColorRGBAToBGR ColorConversionCode = 3
|
||||
|
||||
// ColorBGRToRGB converts from BGR to RGB without alpha channel.
|
||||
ColorBGRToRGB = 4
|
||||
ColorBGRToRGB ColorConversionCode = 4
|
||||
|
||||
// ColorBGRAToRGBA converts from BGR with alpha channel
|
||||
// to RGB with alpha channel.
|
||||
ColorBGRAToRGBA = 5
|
||||
ColorBGRAToRGBA ColorConversionCode = 5
|
||||
|
||||
// ColorBGRToGray converts from BGR to grayscale.
|
||||
ColorBGRToGray = 6
|
||||
ColorBGRToGray ColorConversionCode = 6
|
||||
|
||||
// ColorRGBToGray converts from RGB to grayscale.
|
||||
ColorRGBToGray = 7
|
||||
ColorRGBToGray ColorConversionCode = 7
|
||||
|
||||
// ColorGrayToBGR converts from grayscale to BGR.
|
||||
ColorGrayToBGR = 8
|
||||
ColorGrayToBGR ColorConversionCode = 8
|
||||
|
||||
// ColorGrayToBGRA converts from grayscale to BGR with alpha channel.
|
||||
ColorGrayToBGRA = 9
|
||||
ColorGrayToBGRA ColorConversionCode = 9
|
||||
|
||||
// ColorBGRAToGray converts from BGR with alpha channel to grayscale.
|
||||
ColorBGRAToGray = 10
|
||||
ColorBGRAToGray ColorConversionCode = 10
|
||||
|
||||
// ColorRGBAToGray converts from RGB with alpha channel to grayscale.
|
||||
ColorRGBAToGray = 11
|
||||
ColorRGBAToGray ColorConversionCode = 11
|
||||
|
||||
// ColorBGRToBGR565 converts from BGR to BGR565 (16-bit images).
|
||||
ColorBGRToBGR565 = 12
|
||||
ColorBGRToBGR565 ColorConversionCode = 12
|
||||
|
||||
// ColorRGBToBGR565 converts from RGB to BGR565 (16-bit images).
|
||||
ColorRGBToBGR565 = 13
|
||||
ColorRGBToBGR565 ColorConversionCode = 13
|
||||
|
||||
// ColorBGR565ToBGR converts from BGR565 (16-bit images) to BGR.
|
||||
ColorBGR565ToBGR = 14
|
||||
ColorBGR565ToBGR ColorConversionCode = 14
|
||||
|
||||
// ColorBGR565ToRGB converts from BGR565 (16-bit images) to RGB.
|
||||
ColorBGR565ToRGB = 15
|
||||
ColorBGR565ToRGB ColorConversionCode = 15
|
||||
|
||||
// ColorBGRAToBGR565 converts from BGRA (with alpha channel)
|
||||
// to BGR565 (16-bit images).
|
||||
ColorBGRAToBGR565 = 16
|
||||
ColorBGRAToBGR565 ColorConversionCode = 16
|
||||
|
||||
// ColorRGBAToBGR565 converts from RGBA (with alpha channel)
|
||||
// to BGR565 (16-bit images).
|
||||
ColorRGBAToBGR565 = 17
|
||||
ColorRGBAToBGR565 ColorConversionCode = 17
|
||||
|
||||
// ColorBGR565ToBGRA converts from BGR565 (16-bit images)
|
||||
// to BGRA (with alpha channel).
|
||||
ColorBGR565ToBGRA = 18
|
||||
ColorBGR565ToBGRA ColorConversionCode = 18
|
||||
|
||||
// ColorBGR565ToRGBA converts from BGR565 (16-bit images)
|
||||
// to RGBA (with alpha channel).
|
||||
ColorBGR565ToRGBA = 19
|
||||
ColorBGR565ToRGBA ColorConversionCode = 19
|
||||
|
||||
// ColorGrayToBGR565 converts from grayscale
|
||||
// to BGR565 (16-bit images).
|
||||
ColorGrayToBGR565 = 20
|
||||
ColorGrayToBGR565 ColorConversionCode = 20
|
||||
|
||||
// ColorBGR565ToGray converts from BGR565 (16-bit images)
|
||||
// to grayscale.
|
||||
ColorBGR565ToGray = 21
|
||||
ColorBGR565ToGray ColorConversionCode = 21
|
||||
|
||||
// ColorBGRToBGR555 converts from BGR to BGR555 (16-bit images).
|
||||
ColorBGRToBGR555 = 22
|
||||
ColorBGRToBGR555 ColorConversionCode = 22
|
||||
|
||||
// ColorRGBToBGR555 converts from RGB to BGR555 (16-bit images).
|
||||
ColorRGBToBGR555 = 23
|
||||
ColorRGBToBGR555 ColorConversionCode = 23
|
||||
|
||||
// ColorBGR555ToBGR converts from BGR555 (16-bit images) to BGR.
|
||||
ColorBGR555ToBGR = 24
|
||||
ColorBGR555ToBGR ColorConversionCode = 24
|
||||
|
||||
// ColorBGR555ToRGB converts from BGR555 (16-bit images) to RGB.
|
||||
ColorBGR555ToRGB = 25
|
||||
ColorBGR555ToRGB ColorConversionCode = 25
|
||||
|
||||
// ColorBGRAToBGR555 converts from BGRA (with alpha channel)
|
||||
// to BGR555 (16-bit images).
|
||||
ColorBGRAToBGR555 = 26
|
||||
ColorBGRAToBGR555 ColorConversionCode = 26
|
||||
|
||||
// ColorRGBAToBGR555 converts from RGBA (with alpha channel)
|
||||
// to BGR555 (16-bit images).
|
||||
ColorRGBAToBGR555 = 27
|
||||
ColorRGBAToBGR555 ColorConversionCode = 27
|
||||
|
||||
// ColorBGR555ToBGRA converts from BGR555 (16-bit images)
|
||||
// to BGRA (with alpha channel).
|
||||
ColorBGR555ToBGRA = 28
|
||||
ColorBGR555ToBGRA ColorConversionCode = 28
|
||||
|
||||
// ColorBGR555ToRGBA converts from BGR555 (16-bit images)
|
||||
// to RGBA (with alpha channel).
|
||||
ColorBGR555ToRGBA = 29
|
||||
ColorBGR555ToRGBA ColorConversionCode = 29
|
||||
|
||||
// ColorGrayToBGR555 converts from grayscale to BGR555 (16-bit images).
|
||||
ColorGrayToBGR555 = 30
|
||||
ColorGrayToBGR555 ColorConversionCode = 30
|
||||
|
||||
// ColorBGR555ToGRAY converts from BGR555 (16-bit images) to grayscale.
|
||||
ColorBGR555ToGRAY = 31
|
||||
ColorBGR555ToGRAY ColorConversionCode = 31
|
||||
|
||||
// ColorBGRToXYZ converts from BGR to CIE XYZ.
|
||||
ColorBGRToXYZ = 32
|
||||
ColorBGRToXYZ ColorConversionCode = 32
|
||||
|
||||
// ColorRGBToXYZ converts from RGB to CIE XYZ.
|
||||
ColorRGBToXYZ = 33
|
||||
ColorRGBToXYZ ColorConversionCode = 33
|
||||
|
||||
// ColorXYZToBGR converts from CIE XYZ to BGR.
|
||||
ColorXYZToBGR = 34
|
||||
ColorXYZToBGR ColorConversionCode = 34
|
||||
|
||||
// ColorXYZToRGB converts from CIE XYZ to RGB.
|
||||
ColorXYZToRGB = 35
|
||||
ColorXYZToRGB ColorConversionCode = 35
|
||||
|
||||
// ColorBGRToYCrCb converts from BGR to luma-chroma (aka YCC).
|
||||
ColorBGRToYCrCb = 36
|
||||
ColorBGRToYCrCb ColorConversionCode = 36
|
||||
|
||||
// ColorRGBToYCrCb converts from RGB to luma-chroma (aka YCC).
|
||||
ColorRGBToYCrCb = 37
|
||||
ColorRGBToYCrCb ColorConversionCode = 37
|
||||
|
||||
// ColorYCrCbToBGR converts from luma-chroma (aka YCC) to BGR.
|
||||
ColorYCrCbToBGR = 38
|
||||
ColorYCrCbToBGR ColorConversionCode = 38
|
||||
|
||||
// ColorYCrCbToRGB converts from luma-chroma (aka YCC) to RGB.
|
||||
ColorYCrCbToRGB = 39
|
||||
ColorYCrCbToRGB ColorConversionCode = 39
|
||||
|
||||
// ColorBGRToHSV converts from BGR to HSV (hue saturation value).
|
||||
ColorBGRToHSV = 40
|
||||
ColorBGRToHSV ColorConversionCode = 40
|
||||
|
||||
// ColorRGBToHSV converts from RGB to HSV (hue saturation value).
|
||||
ColorRGBToHSV = 41
|
||||
ColorRGBToHSV ColorConversionCode = 41
|
||||
|
||||
// ColorBGRToLab converts from BGR to CIE Lab.
|
||||
ColorBGRToLab = 44
|
||||
ColorBGRToLab ColorConversionCode = 44
|
||||
|
||||
// ColorRGBToLab converts from RGB to CIE Lab.
|
||||
ColorRGBToLab = 45
|
||||
ColorRGBToLab ColorConversionCode = 45
|
||||
|
||||
// ColorBGRToLuv converts from BGR to CIE Luv.
|
||||
ColorBGRToLuv = 50
|
||||
ColorBGRToLuv ColorConversionCode = 50
|
||||
|
||||
// ColorRGBToLuv converts from RGB to CIE Luv.
|
||||
ColorRGBToLuv = 51
|
||||
ColorRGBToLuv ColorConversionCode = 51
|
||||
|
||||
// ColorBGRToHLS converts from BGR to HLS (hue lightness saturation).
|
||||
ColorBGRToHLS = 52
|
||||
ColorBGRToHLS ColorConversionCode = 52
|
||||
|
||||
// ColorRGBToHLS converts from RGB to HLS (hue lightness saturation).
|
||||
ColorRGBToHLS = 53
|
||||
ColorRGBToHLS ColorConversionCode = 53
|
||||
|
||||
// ColorHSVToBGR converts from HSV (hue saturation value) to BGR.
|
||||
ColorHSVToBGR = 54
|
||||
ColorHSVToBGR ColorConversionCode = 54
|
||||
|
||||
// ColorHSVToRGB converts from HSV (hue saturation value) to RGB.
|
||||
ColorHSVToRGB = 55
|
||||
ColorHSVToRGB ColorConversionCode = 55
|
||||
|
||||
// ColorLabToBGR converts from CIE Lab to BGR.
|
||||
ColorLabToBGR = 56
|
||||
ColorLabToBGR ColorConversionCode = 56
|
||||
|
||||
// ColorLabToRGB converts from CIE Lab to RGB.
|
||||
ColorLabToRGB = 57
|
||||
ColorLabToRGB ColorConversionCode = 57
|
||||
|
||||
// ColorLuvToBGR converts from CIE Luv to BGR.
|
||||
ColorLuvToBGR = 58
|
||||
ColorLuvToBGR ColorConversionCode = 58
|
||||
|
||||
// ColorLuvToRGB converts from CIE Luv to RGB.
|
||||
ColorLuvToRGB = 59
|
||||
ColorLuvToRGB ColorConversionCode = 59
|
||||
|
||||
// ColorHLSToBGR converts from HLS (hue lightness saturation) to BGR.
|
||||
ColorHLSToBGR = 60
|
||||
ColorHLSToBGR ColorConversionCode = 60
|
||||
|
||||
// ColorHLSToRGB converts from HLS (hue lightness saturation) to RGB.
|
||||
ColorHLSToRGB = 61
|
||||
ColorHLSToRGB ColorConversionCode = 61
|
||||
|
||||
// ColorBGRToHSVFull converts from BGR to HSV (hue saturation value) full.
|
||||
ColorBGRToHSVFull = 66
|
||||
ColorBGRToHSVFull ColorConversionCode = 66
|
||||
|
||||
// ColorRGBToHSVFull converts from RGB to HSV (hue saturation value) full.
|
||||
ColorRGBToHSVFull = 67
|
||||
ColorRGBToHSVFull ColorConversionCode = 67
|
||||
|
||||
// ColorBGRToHLSFull converts from BGR to HLS (hue lightness saturation) full.
|
||||
ColorBGRToHLSFull = 68
|
||||
ColorBGRToHLSFull ColorConversionCode = 68
|
||||
|
||||
// ColorRGBToHLSFull converts from RGB to HLS (hue lightness saturation) full.
|
||||
ColorRGBToHLSFull = 69
|
||||
ColorRGBToHLSFull ColorConversionCode = 69
|
||||
|
||||
// ColorHSVToBGRFull converts from HSV (hue saturation value) to BGR full.
|
||||
ColorHSVToBGRFull = 70
|
||||
ColorHSVToBGRFull ColorConversionCode = 70
|
||||
|
||||
// ColorHSVToRGBFull converts from HSV (hue saturation value) to RGB full.
|
||||
ColorHSVToRGBFull = 71
|
||||
ColorHSVToRGBFull ColorConversionCode = 71
|
||||
|
||||
// ColorHLSToBGRFull converts from HLS (hue lightness saturation) to BGR full.
|
||||
ColorHLSToBGRFull = 72
|
||||
ColorHLSToBGRFull ColorConversionCode = 72
|
||||
|
||||
// ColorHLSToRGBFull converts from HLS (hue lightness saturation) to RGB full.
|
||||
ColorHLSToRGBFull = 73
|
||||
ColorHLSToRGBFull ColorConversionCode = 73
|
||||
|
||||
// ColorLBGRToLab converts from LBGR to CIE Lab.
|
||||
ColorLBGRToLab = 74
|
||||
ColorLBGRToLab ColorConversionCode = 74
|
||||
|
||||
// ColorLRGBToLab converts from LRGB to CIE Lab.
|
||||
ColorLRGBToLab = 75
|
||||
ColorLRGBToLab ColorConversionCode = 75
|
||||
|
||||
// ColorLBGRToLuv converts from LBGR to CIE Luv.
|
||||
ColorLBGRToLuv = 76
|
||||
ColorLBGRToLuv ColorConversionCode = 76
|
||||
|
||||
// ColorLRGBToLuv converts from LRGB to CIE Luv.
|
||||
ColorLRGBToLuv = 77
|
||||
ColorLRGBToLuv ColorConversionCode = 77
|
||||
|
||||
// ColorLabToLBGR converts from CIE Lab to LBGR.
|
||||
ColorLabToLBGR = 78
|
||||
ColorLabToLBGR ColorConversionCode = 78
|
||||
|
||||
// ColorLabToLRGB converts from CIE Lab to LRGB.
|
||||
ColorLabToLRGB = 79
|
||||
ColorLabToLRGB ColorConversionCode = 79
|
||||
|
||||
// ColorLuvToLBGR converts from CIE Luv to LBGR.
|
||||
ColorLuvToLBGR = 80
|
||||
ColorLuvToLBGR ColorConversionCode = 80
|
||||
|
||||
// ColorLuvToLRGB converts from CIE Luv to LRGB.
|
||||
ColorLuvToLRGB = 81
|
||||
ColorLuvToLRGB ColorConversionCode = 81
|
||||
|
||||
// ColorBGRToYUV converts from BGR to YUV.
|
||||
ColorBGRToYUV = 82
|
||||
ColorBGRToYUV ColorConversionCode = 82
|
||||
|
||||
// ColorRGBToYUV converts from RGB to YUV.
|
||||
ColorRGBToYUV = 83
|
||||
ColorRGBToYUV ColorConversionCode = 83
|
||||
|
||||
// ColorYUVToBGR converts from YUV to BGR.
|
||||
ColorYUVToBGR = 84
|
||||
ColorYUVToBGR ColorConversionCode = 84
|
||||
|
||||
// ColorYUVToRGB converts from YUV to RGB.
|
||||
ColorYUVToRGB = 85
|
||||
ColorYUVToRGB ColorConversionCode = 85
|
||||
|
||||
// ColorYUVToRGBNV12 converts from YUV 4:2:0 to RGB NV12.
|
||||
ColorYUVToRGBNV12 = 90
|
||||
ColorYUVToRGBNV12 ColorConversionCode = 90
|
||||
|
||||
// ColorYUVToBGRNV12 converts from YUV 4:2:0 to BGR NV12.
|
||||
ColorYUVToBGRNV12 = 91
|
||||
ColorYUVToBGRNV12 ColorConversionCode = 91
|
||||
|
||||
// ColorYUVToRGBNV21 converts from YUV 4:2:0 to RGB NV21.
|
||||
ColorYUVToRGBNV21 = 92
|
||||
ColorYUVToRGBNV21 ColorConversionCode = 92
|
||||
|
||||
// ColorYUVToBGRNV21 converts from YUV 4:2:0 to BGR NV21.
|
||||
ColorYUVToBGRNV21 = 93
|
||||
ColorYUVToBGRNV21 ColorConversionCode = 93
|
||||
|
||||
// ColorYUVToRGBANV12 converts from YUV 4:2:0 to RGBA NV12.
|
||||
ColorYUVToRGBANV12 = 94
|
||||
ColorYUVToRGBANV12 ColorConversionCode = 94
|
||||
|
||||
// ColorYUVToBGRANV12 converts from YUV 4:2:0 to BGRA NV12.
|
||||
ColorYUVToBGRANV12 = 95
|
||||
ColorYUVToBGRANV12 ColorConversionCode = 95
|
||||
|
||||
// ColorYUVToRGBANV21 converts from YUV 4:2:0 to RGBA NV21.
|
||||
ColorYUVToRGBANV21 = 96
|
||||
ColorYUVToRGBANV21 ColorConversionCode = 96
|
||||
|
||||
// ColorYUVToBGRANV21 converts from YUV 4:2:0 to BGRA NV21.
|
||||
ColorYUVToBGRANV21 = 97
|
||||
ColorYUVToBGRANV21 ColorConversionCode = 97
|
||||
|
||||
ColorYUVToRGBYV12 = 98
|
||||
ColorYUVToBGRYV12 = 99
|
||||
ColorYUVToRGBIYUV = 100
|
||||
ColorYUVToBGRIYUV = 101
|
||||
ColorYUVToRGBYV12 ColorConversionCode = 98
|
||||
ColorYUVToBGRYV12 ColorConversionCode = 99
|
||||
ColorYUVToRGBIYUV ColorConversionCode = 100
|
||||
ColorYUVToBGRIYUV ColorConversionCode = 101
|
||||
|
||||
ColorYUVToRGBAYV12 = 102
|
||||
ColorYUVToBGRAYV12 = 103
|
||||
ColorYUVToRGBAIYUV = 104
|
||||
ColorYUVToBGRAIYUV = 105
|
||||
ColorYUVToRGBAYV12 ColorConversionCode = 102
|
||||
ColorYUVToBGRAYV12 ColorConversionCode = 103
|
||||
ColorYUVToRGBAIYUV ColorConversionCode = 104
|
||||
ColorYUVToBGRAIYUV ColorConversionCode = 105
|
||||
|
||||
ColorYUVToGRAY420 = 106
|
||||
ColorYUVToGRAY420 ColorConversionCode = 106
|
||||
|
||||
// YUV 4:2:2 family to RGB
|
||||
ColorYUVToRGBUYVY = 107
|
||||
ColorYUVToBGRUYVY = 108
|
||||
ColorYUVToRGBUYVY ColorConversionCode = 107
|
||||
ColorYUVToBGRUYVY ColorConversionCode = 108
|
||||
|
||||
ColorYUVToRGBAUYVY = 111
|
||||
ColorYUVToBGRAUYVY = 112
|
||||
ColorYUVToRGBAUYVY ColorConversionCode = 111
|
||||
ColorYUVToBGRAUYVY ColorConversionCode = 112
|
||||
|
||||
ColorYUVToRGBYUY2 = 115
|
||||
ColorYUVToBGRYUY2 = 116
|
||||
ColorYUVToRGBYVYU = 117
|
||||
ColorYUVToBGRYVYU = 118
|
||||
ColorYUVToRGBYUY2 ColorConversionCode = 115
|
||||
ColorYUVToBGRYUY2 ColorConversionCode = 116
|
||||
ColorYUVToRGBYVYU ColorConversionCode = 117
|
||||
ColorYUVToBGRYVYU ColorConversionCode = 118
|
||||
|
||||
ColorYUVToRGBAYUY2 = 119
|
||||
ColorYUVToBGRAYUY2 = 120
|
||||
ColorYUVToRGBAYVYU = 121
|
||||
ColorYUVToBGRAYVYU = 122
|
||||
ColorYUVToRGBAYUY2 ColorConversionCode = 119
|
||||
ColorYUVToBGRAYUY2 ColorConversionCode = 120
|
||||
ColorYUVToRGBAYVYU ColorConversionCode = 121
|
||||
ColorYUVToBGRAYVYU ColorConversionCode = 122
|
||||
|
||||
ColorYUVToGRAYUYVY = 123
|
||||
ColorYUVToGRAYYUY2 = 124
|
||||
ColorYUVToGRAYUYVY ColorConversionCode = 123
|
||||
ColorYUVToGRAYYUY2 ColorConversionCode = 124
|
||||
|
||||
// alpha premultiplication
|
||||
ColorRGBATomRGBA = 125
|
||||
ColormRGBAToRGBA = 126
|
||||
ColorRGBATomRGBA ColorConversionCode = 125
|
||||
ColormRGBAToRGBA ColorConversionCode = 126
|
||||
|
||||
// RGB to YUV 4:2:0 family
|
||||
ColorRGBToYUVI420 = 127
|
||||
ColorBGRToYUVI420 = 128
|
||||
ColorRGBToYUVI420 ColorConversionCode = 127
|
||||
ColorBGRToYUVI420 ColorConversionCode = 128
|
||||
|
||||
ColorRGBAToYUVI420 = 129
|
||||
ColorBGRAToYUVI420 = 130
|
||||
ColorRGBToYUVYV12 = 131
|
||||
ColorBGRToYUVYV12 = 132
|
||||
ColorRGBAToYUVYV12 = 133
|
||||
ColorBGRAToYUVYV12 = 134
|
||||
ColorRGBAToYUVI420 ColorConversionCode = 129
|
||||
ColorBGRAToYUVI420 ColorConversionCode = 130
|
||||
ColorRGBToYUVYV12 ColorConversionCode = 131
|
||||
ColorBGRToYUVYV12 ColorConversionCode = 132
|
||||
ColorRGBAToYUVYV12 ColorConversionCode = 133
|
||||
ColorBGRAToYUVYV12 ColorConversionCode = 134
|
||||
|
||||
// Demosaicing
|
||||
ColorBayerBGToBGR = 46
|
||||
ColorBayerGBToBGR = 47
|
||||
ColorBayerRGToBGR = 48
|
||||
ColorBayerGRToBGR = 49
|
||||
ColorBayerBGToBGR ColorConversionCode = 46
|
||||
ColorBayerGBToBGR ColorConversionCode = 47
|
||||
ColorBayerRGToBGR ColorConversionCode = 48
|
||||
ColorBayerGRToBGR ColorConversionCode = 49
|
||||
|
||||
ColorBayerBGToGRAY = 86
|
||||
ColorBayerGBToGRAY = 87
|
||||
ColorBayerRGToGRAY = 88
|
||||
ColorBayerGRToGRAY = 89
|
||||
ColorBayerBGToGRAY ColorConversionCode = 86
|
||||
ColorBayerGBToGRAY ColorConversionCode = 87
|
||||
ColorBayerRGToGRAY ColorConversionCode = 88
|
||||
ColorBayerGRToGRAY ColorConversionCode = 89
|
||||
|
||||
// Demosaicing using Variable Number of Gradients
|
||||
ColorBayerBGToBGRVNG = 62
|
||||
ColorBayerGBToBGRVNG = 63
|
||||
ColorBayerRGToBGRVNG = 64
|
||||
ColorBayerGRToBGRVNG = 65
|
||||
ColorBayerBGToBGRVNG ColorConversionCode = 62
|
||||
ColorBayerGBToBGRVNG ColorConversionCode = 63
|
||||
ColorBayerRGToBGRVNG ColorConversionCode = 64
|
||||
ColorBayerGRToBGRVNG ColorConversionCode = 65
|
||||
|
||||
// Edge-Aware Demosaicing
|
||||
ColorBayerBGToBGREA = 135
|
||||
ColorBayerGBToBGREA = 136
|
||||
ColorBayerRGToBGREA = 137
|
||||
ColorBayerGRToBGREA = 138
|
||||
ColorBayerBGToBGREA ColorConversionCode = 135
|
||||
ColorBayerGBToBGREA ColorConversionCode = 136
|
||||
ColorBayerRGToBGREA ColorConversionCode = 137
|
||||
ColorBayerGRToBGREA ColorConversionCode = 138
|
||||
|
||||
// Demosaicing with alpha channel
|
||||
ColorBayerBGToBGRA = 139
|
||||
ColorBayerGBToBGRA = 140
|
||||
ColorBayerRGToBGRA = 141
|
||||
ColorBayerGRToBGRA = 142
|
||||
ColorBayerBGToBGRA ColorConversionCode = 139
|
||||
ColorBayerGBToBGRA ColorConversionCode = 140
|
||||
ColorBayerRGToBGRA ColorConversionCode = 141
|
||||
ColorBayerGRToBGRA ColorConversionCode = 142
|
||||
|
||||
ColorCOLORCVTMAX = 143
|
||||
ColorCOLORCVTMAX ColorConversionCode = 143
|
||||
)
|
||||
|
||||
+1
-1
@@ -1,7 +1,7 @@
|
||||
#!/bin/bash
|
||||
set -eux -o pipefail
|
||||
|
||||
OPENCV_VERSION=${OPENCV_VERSION:-4.2.0}
|
||||
OPENCV_VERSION=${OPENCV_VERSION:-4.4.0}
|
||||
|
||||
#GRAPHICAL=ON
|
||||
GRAPHICAL=${GRAPHICAL:-OFF}
|
||||
|
||||
+1
-1
@@ -7,7 +7,7 @@ package gocv
|
||||
import "C"
|
||||
|
||||
// GoCVVersion of this package, for display purposes.
|
||||
const GoCVVersion = "0.22.0"
|
||||
const GoCVVersion = "0.24.0"
|
||||
|
||||
// Version returns the current golang package version
|
||||
func Version() string {
|
||||
|
||||
+38
-38
@@ -23,133 +23,133 @@ const (
|
||||
|
||||
// VideoCapturePosFrames 0-based index of the frame to be
|
||||
// decoded/captured next.
|
||||
VideoCapturePosFrames = 1
|
||||
VideoCapturePosFrames VideoCaptureProperties = 1
|
||||
|
||||
// VideoCapturePosAVIRatio relative position of the video file:
|
||||
// 0=start of the film, 1=end of the film.
|
||||
VideoCapturePosAVIRatio = 2
|
||||
VideoCapturePosAVIRatio VideoCaptureProperties = 2
|
||||
|
||||
// VideoCaptureFrameWidth is width of the frames in the video stream.
|
||||
VideoCaptureFrameWidth = 3
|
||||
VideoCaptureFrameWidth VideoCaptureProperties = 3
|
||||
|
||||
// VideoCaptureFrameHeight controls height of frames in the video stream.
|
||||
VideoCaptureFrameHeight = 4
|
||||
VideoCaptureFrameHeight VideoCaptureProperties = 4
|
||||
|
||||
// VideoCaptureFPS controls capture frame rate.
|
||||
VideoCaptureFPS = 5
|
||||
VideoCaptureFPS VideoCaptureProperties = 5
|
||||
|
||||
// VideoCaptureFOURCC contains the 4-character code of codec.
|
||||
// see VideoWriter::fourcc for details.
|
||||
VideoCaptureFOURCC = 6
|
||||
VideoCaptureFOURCC VideoCaptureProperties = 6
|
||||
|
||||
// VideoCaptureFrameCount contains number of frames in the video file.
|
||||
VideoCaptureFrameCount = 7
|
||||
VideoCaptureFrameCount VideoCaptureProperties = 7
|
||||
|
||||
// VideoCaptureFormat format of the Mat objects returned by
|
||||
// VideoCapture::retrieve().
|
||||
VideoCaptureFormat = 8
|
||||
VideoCaptureFormat VideoCaptureProperties = 8
|
||||
|
||||
// VideoCaptureMode contains backend-specific value indicating
|
||||
// the current capture mode.
|
||||
VideoCaptureMode = 9
|
||||
VideoCaptureMode VideoCaptureProperties = 9
|
||||
|
||||
// VideoCaptureBrightness is brightness of the image
|
||||
// (only for those cameras that support).
|
||||
VideoCaptureBrightness = 10
|
||||
VideoCaptureBrightness VideoCaptureProperties = 10
|
||||
|
||||
// VideoCaptureContrast is contrast of the image
|
||||
// (only for cameras that support it).
|
||||
VideoCaptureContrast = 11
|
||||
VideoCaptureContrast VideoCaptureProperties = 11
|
||||
|
||||
// VideoCaptureSaturation saturation of the image
|
||||
// (only for cameras that support).
|
||||
VideoCaptureSaturation = 12
|
||||
VideoCaptureSaturation VideoCaptureProperties = 12
|
||||
|
||||
// VideoCaptureHue hue of the image (only for cameras that support).
|
||||
VideoCaptureHue = 13
|
||||
VideoCaptureHue VideoCaptureProperties = 13
|
||||
|
||||
// VideoCaptureGain is the gain of the capture image.
|
||||
// (only for those cameras that support).
|
||||
VideoCaptureGain = 14
|
||||
VideoCaptureGain VideoCaptureProperties = 14
|
||||
|
||||
// VideoCaptureExposure is the exposure of the capture image.
|
||||
// (only for those cameras that support).
|
||||
VideoCaptureExposure = 15
|
||||
VideoCaptureExposure VideoCaptureProperties = 15
|
||||
|
||||
// VideoCaptureConvertRGB is a boolean flags indicating whether
|
||||
// images should be converted to RGB.
|
||||
VideoCaptureConvertRGB = 16
|
||||
VideoCaptureConvertRGB VideoCaptureProperties = 16
|
||||
|
||||
// VideoCaptureWhiteBalanceBlueU is currently unsupported.
|
||||
VideoCaptureWhiteBalanceBlueU = 17
|
||||
VideoCaptureWhiteBalanceBlueU VideoCaptureProperties = 17
|
||||
|
||||
// VideoCaptureRectification is the rectification flag for stereo cameras.
|
||||
// Note: only supported by DC1394 v 2.x backend currently.
|
||||
VideoCaptureRectification = 18
|
||||
VideoCaptureRectification VideoCaptureProperties = 18
|
||||
|
||||
// VideoCaptureMonochrome indicates whether images should be
|
||||
// converted to monochrome.
|
||||
VideoCaptureMonochrome = 19
|
||||
VideoCaptureMonochrome VideoCaptureProperties = 19
|
||||
|
||||
// VideoCaptureSharpness controls image capture sharpness.
|
||||
VideoCaptureSharpness = 20
|
||||
VideoCaptureSharpness VideoCaptureProperties = 20
|
||||
|
||||
// VideoCaptureAutoExposure controls the DC1394 exposure control
|
||||
// done by camera, user can adjust reference level using this feature.
|
||||
VideoCaptureAutoExposure = 21
|
||||
VideoCaptureAutoExposure VideoCaptureProperties = 21
|
||||
|
||||
// VideoCaptureGamma controls video capture gamma.
|
||||
VideoCaptureGamma = 22
|
||||
VideoCaptureGamma VideoCaptureProperties = 22
|
||||
|
||||
// VideoCaptureTemperature controls video capture temperature.
|
||||
VideoCaptureTemperature = 23
|
||||
VideoCaptureTemperature VideoCaptureProperties = 23
|
||||
|
||||
// VideoCaptureTrigger controls video capture trigger.
|
||||
VideoCaptureTrigger = 24
|
||||
VideoCaptureTrigger VideoCaptureProperties = 24
|
||||
|
||||
// VideoCaptureTriggerDelay controls video capture trigger delay.
|
||||
VideoCaptureTriggerDelay = 25
|
||||
VideoCaptureTriggerDelay VideoCaptureProperties = 25
|
||||
|
||||
// VideoCaptureWhiteBalanceRedV controls video capture setting for
|
||||
// white balance.
|
||||
VideoCaptureWhiteBalanceRedV = 26
|
||||
VideoCaptureWhiteBalanceRedV VideoCaptureProperties = 26
|
||||
|
||||
// VideoCaptureZoom controls video capture zoom.
|
||||
VideoCaptureZoom = 27
|
||||
VideoCaptureZoom VideoCaptureProperties = 27
|
||||
|
||||
// VideoCaptureFocus controls video capture focus.
|
||||
VideoCaptureFocus = 28
|
||||
VideoCaptureFocus VideoCaptureProperties = 28
|
||||
|
||||
// VideoCaptureGUID controls video capture GUID.
|
||||
VideoCaptureGUID = 29
|
||||
VideoCaptureGUID VideoCaptureProperties = 29
|
||||
|
||||
// VideoCaptureISOSpeed controls video capture ISO speed.
|
||||
VideoCaptureISOSpeed = 30
|
||||
VideoCaptureISOSpeed VideoCaptureProperties = 30
|
||||
|
||||
// VideoCaptureBacklight controls video capture backlight.
|
||||
VideoCaptureBacklight = 32
|
||||
VideoCaptureBacklight VideoCaptureProperties = 32
|
||||
|
||||
// VideoCapturePan controls video capture pan.
|
||||
VideoCapturePan = 33
|
||||
VideoCapturePan VideoCaptureProperties = 33
|
||||
|
||||
// VideoCaptureTilt controls video capture tilt.
|
||||
VideoCaptureTilt = 34
|
||||
VideoCaptureTilt VideoCaptureProperties = 34
|
||||
|
||||
// VideoCaptureRoll controls video capture roll.
|
||||
VideoCaptureRoll = 35
|
||||
VideoCaptureRoll VideoCaptureProperties = 35
|
||||
|
||||
// VideoCaptureIris controls video capture iris.
|
||||
VideoCaptureIris = 36
|
||||
VideoCaptureIris VideoCaptureProperties = 36
|
||||
|
||||
// VideoCaptureSettings is the pop up video/camera filter dialog. Note:
|
||||
// only supported by DSHOW backend currently. The property value is ignored.
|
||||
VideoCaptureSettings = 37
|
||||
VideoCaptureSettings VideoCaptureProperties = 37
|
||||
|
||||
// VideoCaptureBufferSize controls video capture buffer size.
|
||||
VideoCaptureBufferSize = 38
|
||||
VideoCaptureBufferSize VideoCaptureProperties = 38
|
||||
|
||||
// VideoCaptureAutoFocus controls video capture auto focus..
|
||||
VideoCaptureAutoFocus = 39
|
||||
VideoCaptureAutoFocus VideoCaptureProperties = 39
|
||||
)
|
||||
|
||||
// VideoCapture is a wrapper around the OpenCV VideoCapture class.
|
||||
|
||||
+11
-11
@@ -11,18 +11,18 @@ echo.
|
||||
REM This is why there is no progress bar:
|
||||
REM https://github.com/PowerShell/PowerShell/issues/2138
|
||||
|
||||
echo Downloading: opencv-4.2.0.zip [91MB]
|
||||
powershell -command "[Net.ServicePointManager]::SecurityProtocol = [Net.SecurityProtocolType]::Tls12; $ProgressPreference = 'SilentlyContinue'; Invoke-WebRequest -Uri https://github.com/opencv/opencv/archive/4.2.0.zip -OutFile c:\opencv\opencv-4.2.0.zip"
|
||||
echo Downloading: opencv-4.4.0.zip [91MB]
|
||||
powershell -command "[Net.ServicePointManager]::SecurityProtocol = [Net.SecurityProtocolType]::Tls12; $ProgressPreference = 'SilentlyContinue'; Invoke-WebRequest -Uri https://github.com/opencv/opencv/archive/4.4.0.zip -OutFile c:\opencv\opencv-4.4.0.zip"
|
||||
echo Extracting...
|
||||
powershell -command "$ProgressPreference = 'SilentlyContinue'; Expand-Archive -Path c:\opencv\opencv-4.2.0.zip -DestinationPath c:\opencv"
|
||||
del c:\opencv\opencv-4.2.0.zip /q
|
||||
powershell -command "$ProgressPreference = 'SilentlyContinue'; Expand-Archive -Path c:\opencv\opencv-4.4.0.zip -DestinationPath c:\opencv"
|
||||
del c:\opencv\opencv-4.4.0.zip /q
|
||||
echo.
|
||||
|
||||
echo Downloading: opencv_contrib-4.2.0.zip [58MB]
|
||||
powershell -command "[Net.ServicePointManager]::SecurityProtocol = [Net.SecurityProtocolType]::Tls12; $ProgressPreference = 'SilentlyContinue'; Invoke-WebRequest -Uri https://github.com/opencv/opencv_contrib/archive/4.2.0.zip -OutFile c:\opencv\opencv_contrib-4.2.0.zip"
|
||||
echo Downloading: opencv_contrib-4.4.0.zip [58MB]
|
||||
powershell -command "[Net.ServicePointManager]::SecurityProtocol = [Net.SecurityProtocolType]::Tls12; $ProgressPreference = 'SilentlyContinue'; Invoke-WebRequest -Uri https://github.com/opencv/opencv_contrib/archive/4.4.0.zip -OutFile c:\opencv\opencv_contrib-4.4.0.zip"
|
||||
echo Extracting...
|
||||
powershell -command "$ProgressPreference = 'SilentlyContinue'; Expand-Archive -Path c:\opencv\opencv_contrib-4.2.0.zip -DestinationPath c:\opencv"
|
||||
del c:\opencv\opencv_contrib-4.2.0.zip /q
|
||||
powershell -command "$ProgressPreference = 'SilentlyContinue'; Expand-Archive -Path c:\opencv\opencv_contrib-4.4.0.zip -DestinationPath c:\opencv"
|
||||
del c:\opencv\opencv_contrib-4.4.0.zip /q
|
||||
echo.
|
||||
|
||||
echo Done with downloading and extracting sources.
|
||||
@@ -32,9 +32,9 @@ echo on
|
||||
|
||||
cd /D C:\opencv\build
|
||||
set PATH=%PATH%;C:\Program Files (x86)\CMake\bin;C:\mingw-w64\x86_64-6.3.0-posix-seh-rt_v5-rev1\mingw64\bin
|
||||
cmake C:\opencv\opencv-4.2.0 -G "MinGW Makefiles" -BC:\opencv\build -DENABLE_CXX11=ON -DOPENCV_EXTRA_MODULES_PATH=C:\opencv\opencv_contrib-4.2.0\modules -DBUILD_SHARED_LIBS=ON -DWITH_IPP=OFF -DWITH_MSMF=OFF -DBUILD_EXAMPLES=OFF -DBUILD_TESTS=OFF -DBUILD_PERF_TESTS=OFF -DBUILD_opencv_java=OFF -DBUILD_opencv_python=OFF -DBUILD_opencv_python2=OFF -DBUILD_opencv_python3=OFF -DBUILD_DOCS=OFF -DENABLE_PRECOMPILED_HEADERS=OFF -DBUILD_opencv_saliency=OFF -DCPU_DISPATCH= -DOPENCV_GENERATE_PKGCONFIG=ON -DWITH_OPENCL_D3D11_NV=OFF -Wno-dev
|
||||
cmake C:\opencv\opencv-4.4.0 -G "MinGW Makefiles" -BC:\opencv\build -DENABLE_CXX11=ON -DOPENCV_EXTRA_MODULES_PATH=C:\opencv\opencv_contrib-4.4.0\modules -DBUILD_SHARED_LIBS=ON -DWITH_IPP=OFF -DWITH_MSMF=OFF -DBUILD_EXAMPLES=OFF -DBUILD_TESTS=OFF -DBUILD_PERF_TESTS=OFF -DBUILD_opencv_java=OFF -DBUILD_opencv_python=OFF -DBUILD_opencv_python2=OFF -DBUILD_opencv_python3=OFF -DBUILD_DOCS=OFF -DENABLE_PRECOMPILED_HEADERS=OFF -DBUILD_opencv_saliency=OFF -DCPU_DISPATCH= -DOPENCV_GENERATE_PKGCONFIG=ON -DWITH_OPENCL_D3D11_NV=OFF -DOPENCV_ALLOCATOR_STATS_COUNTER_TYPE=int64_t -Wno-dev
|
||||
mingw32-make -j%NUMBER_OF_PROCESSORS%
|
||||
mingw32-make install
|
||||
rmdir c:\opencv\opencv-4.2.0 /s /q
|
||||
rmdir c:\opencv\opencv_contrib-4.2.0 /s /q
|
||||
rmdir c:\opencv\opencv-4.4.0 /s /q
|
||||
rmdir c:\opencv\opencv_contrib-4.4.0 /s /q
|
||||
chdir /D %GOPATH%\src\gocv.io\x\gocv
|
||||
|
||||
Reference in New Issue
Block a user